摘要: 激光雷达作为主动式遥感技术的一个主要分支,具有不依赖于太阳辐射、穿透性强等优势,激光雷达技术相较于影像技术获取的点云数据精度更高,可以进行高效的数据生产、树障分析、电力巡线等。数字绿土机载激光雷达扫描设备能够获得厘米级精度点云,并快速识别杆、塔、线等物体。
无人机激光雷达扫描设备为各行业诸如林业、电力、矿山等提供了高精度三维点云数据。但在数据采集过程中仍然存在点云密度过大,点云过厚等问题。经过数据解算得到的原始点云,部分数据点密度可达400-800/㎡,裸露地表处点云厚度可达15-20cm,其高程和平面精度难以满足高精度数据生产需求。

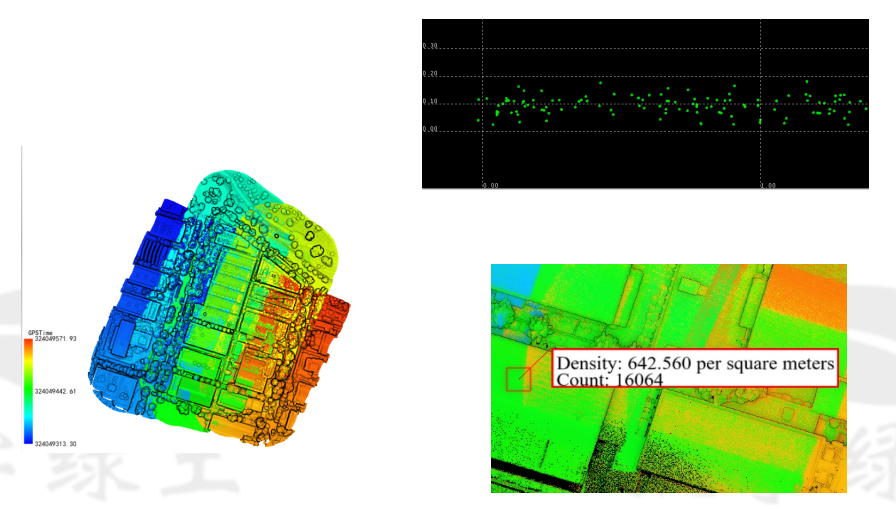
「无人机挂载的激光雷达系统获取的点云数据屋顶区域原始点云厚度、密度」
按照多余观测正态分布概率,地表点云中位数的精度高于其它点位,提取该区域点云数据,可提高数据水平精度、高程精度。因此,在实际数据生产之前,需要先对数据进行压薄处理及点云平滑,同时需要保证地物特征的完整性。本例中,我们使用LiDAR360软件的“工具箱>数据管理>点云平滑”工具展示对无人机 LIDAR 系统获取的数据进行平滑处理的示例。
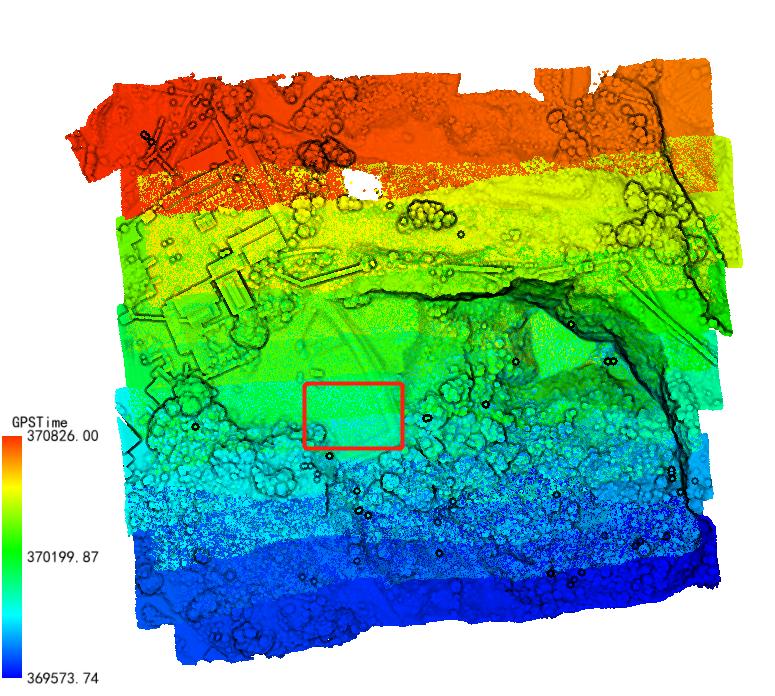
「红色区域范围为测试区域」
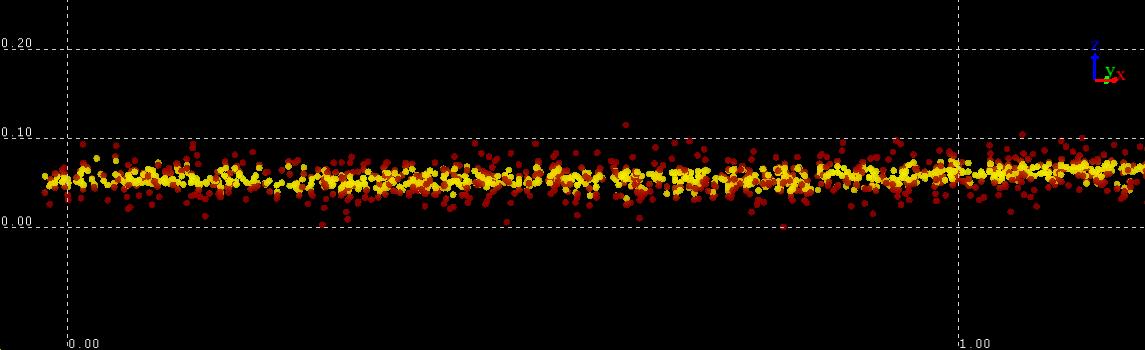
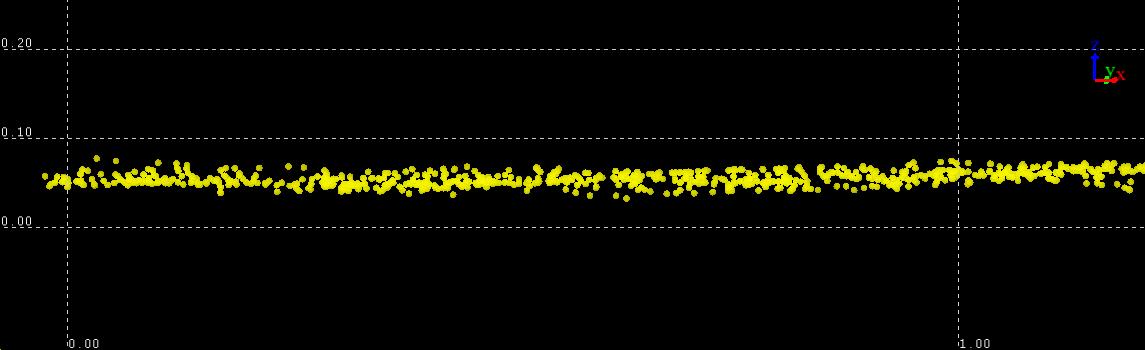
裸露地表处点云平滑前后数据叠加显示(红色为平滑前,黄色为平滑后)
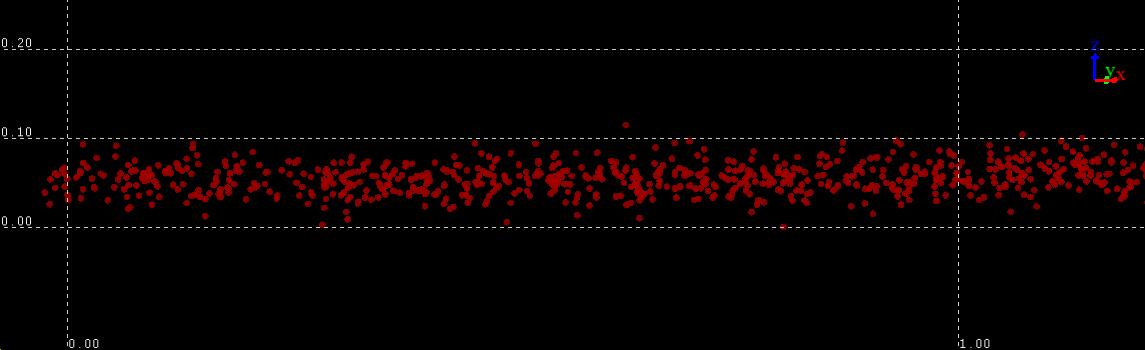
平滑前地表点云厚度为10cm左右
平滑后地表点云厚度降至5cm内
对多线激光器获取的雷达点云数据,用LiDAR360【点云平滑】工具进行优化处理,点云厚度可降低到5cm范围内,且平滑后地物特征保留完好,符合高精度数据生产的要求。
数字绿土的点云和影像处理软件系统可以有效降低裸露地表处点云厚度,在对点云进行压薄处理的同时,保留地表特征,可实现轻小型无人机激光雷达数据质量较大的提升。系统点云平滑工具同样适用于背包、站扫、车载等多线激光雷达设备采集的数据,对点云数据进行生产前的优化处理。