
一、LiAir X3 介绍

 LiAir X3 是数字绿土推出的全新一代轻小型智能化无人机激光雷达系统。该系统集成了激光雷达传感器、惯性导航系统、测绘相机和高性能边缘计算平台,采用了数字绿土自研的AirPilot自主飞行算法,具备空基L3等级“自动驾驶”能力,可智能化自主仿线飞行,自主识别分叉线路、实时检测树障、自动过塔转弯等,无需提前规划航线。相比上一代产品,LiAir X3 整机一体化程度更高,仿线算法升级,设备更加智能,仿线成功率明显提升。
LiAir X3 是数字绿土推出的全新一代轻小型智能化无人机激光雷达系统。该系统集成了激光雷达传感器、惯性导航系统、测绘相机和高性能边缘计算平台,采用了数字绿土自研的AirPilot自主飞行算法,具备空基L3等级“自动驾驶”能力,可智能化自主仿线飞行,自主识别分叉线路、实时检测树障、自动过塔转弯等,无需提前规划航线。相比上一代产品,LiAir X3 整机一体化程度更高,仿线算法升级,设备更加智能,仿线成功率明显提升。
二、LiAir X3 功能
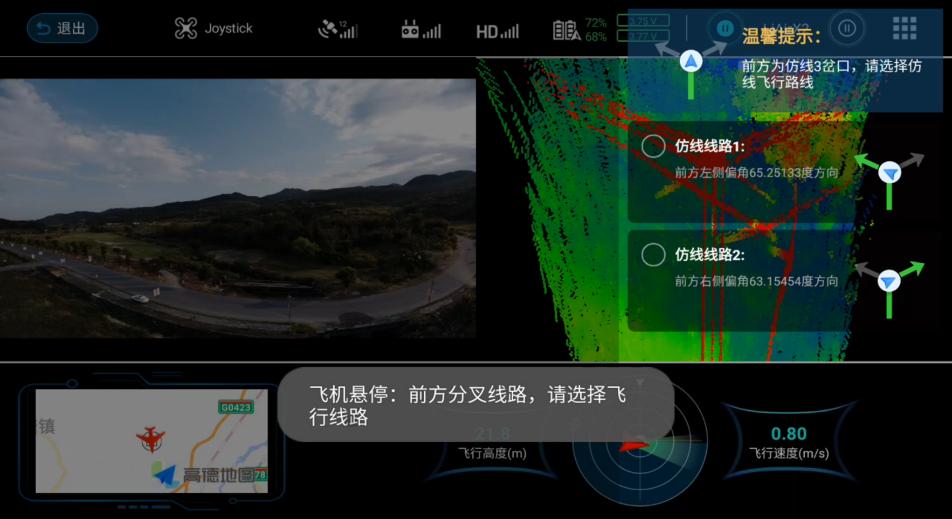
● 仿线失败时自动悬停
● 飞机距离障碍物小于5m时自动悬停
● 飞机低电量(小于25%)或者与遥控器失联状态下自动悬停
「净空距离精确至厘米」
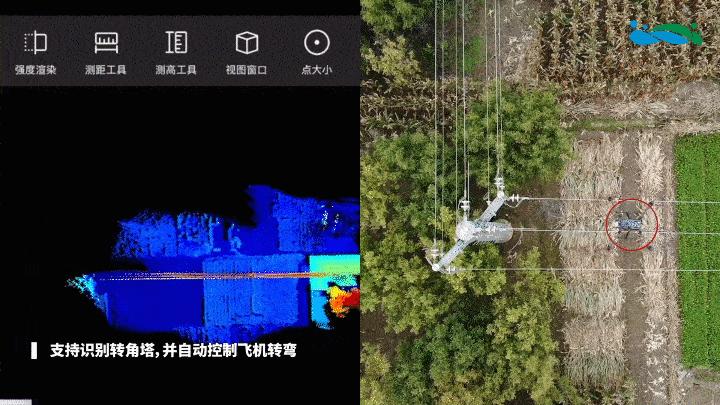
LiAir X3除了能识别导线外,还能识别提取树障目标,并计算电力线和树障之间的相对距离,对于间距过于近的树障目标自动标注为危险点,予以高亮显示,实现了树障危险的快速巡查。
● 地面基础稳定,便于安置接收设备和操作
● 视野开阔,视场周围障碍物的高度角小于 10°~15°
● 附近不应有强烈反射卫星信号的物体(如大型建筑物等)
● 远离大功率无线电发射源(如电视台、电台、微波站等)
(2)绿土云迹
● 若未架设实体基站,可选择绿土云迹的定位功能。
3、飞行作业(无需规划航线)
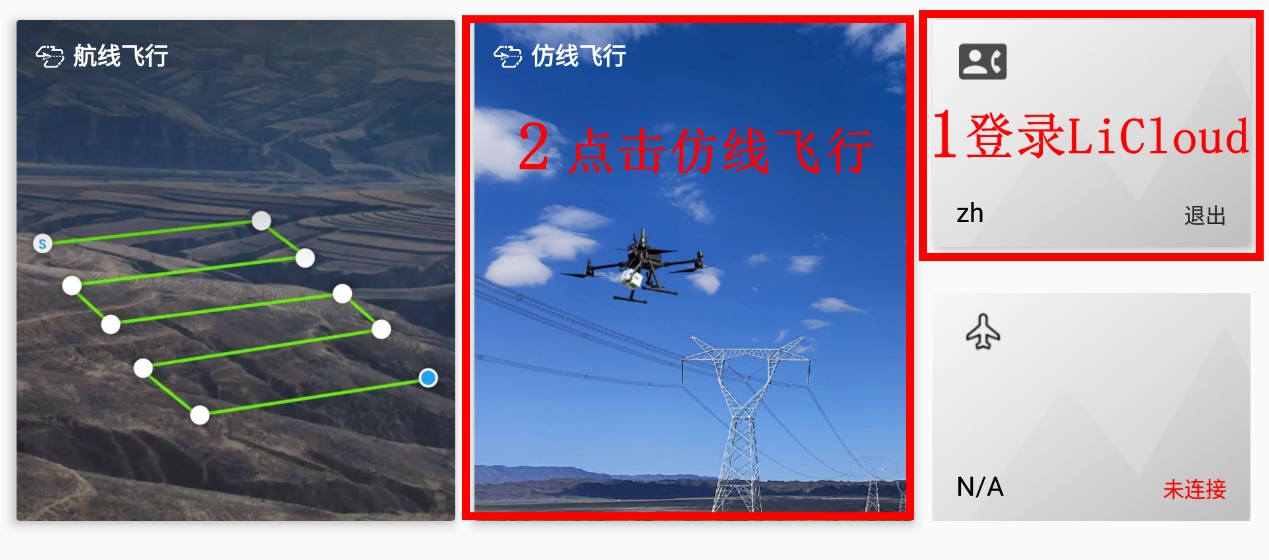
● 起飞前,遥控器切到P模式再切回非P模式,确保飞机解除在非P档模式下起飞保护;
● 起飞后,手动控制飞机飞行到线路上方,距离杆塔高约15m,机头对准电力线走向。之后遥控器切到P模式,设备将自动跟踪导线,与电力线保持固定距离(即设置的仿线高度)匀速飞行(仿线速度)。仿线过程可以切换非P和P模式,随时退出/进入自主仿线状态。