
LiGrip手持旋转激光扫描仪的高精度特性能够为立面图绘制提供准确且稳定的数据,并结合高效、智能化的LiFuser-BP解算软件,有效提高了测算效率,降低了内业处理的时间成本。利用激光雷达和SLAM算法可以实现室内多场景一体化测量,广泛应用于林业、地下空间、矿道、街道立面、堆体体积等领域,LiGrip可快速三维建模,形成矢量图,为立面美化的预算提供数据信息。
随着美化和整改城市老旧小区立面改造工程的项目逐渐增多,LiGrip扫描仪的应用也会更加广泛,下面针对旧城改造立面测量的应用进行方案分享。
一、数据采集的方案
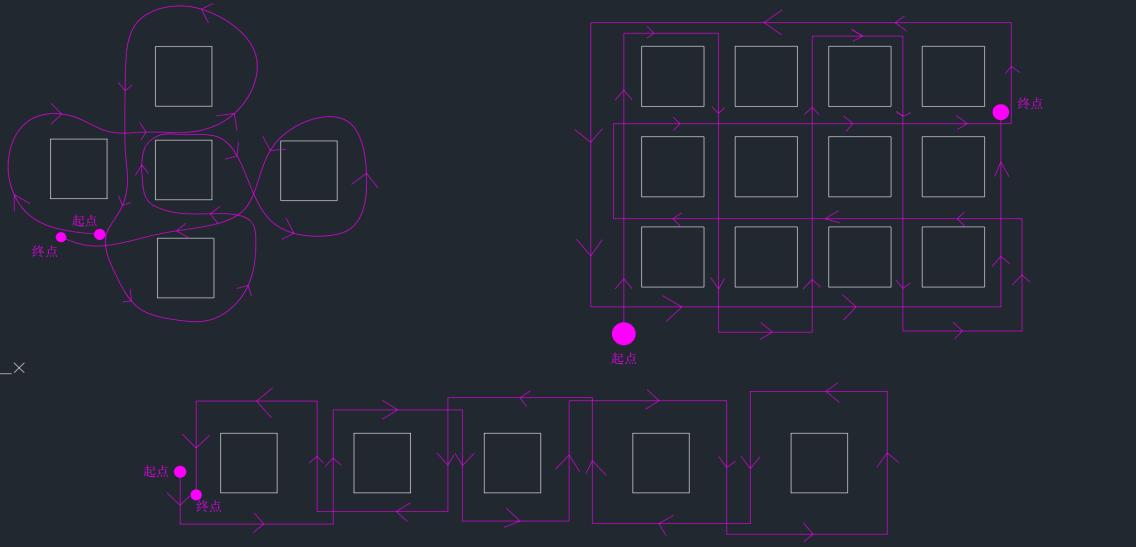
2、路线规划
闭环路线可以有效减少控制点,提高精度。
3、控制测量
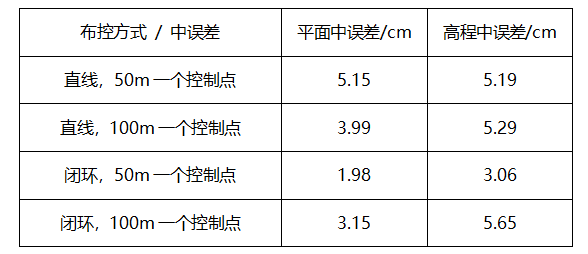
1)布设密度及其精度
通过布设控制点,来验证LiGrip采集数据的精度。控制点与精度的对应关系如下:
2)控制点布设原则
控制点布设原则如下:
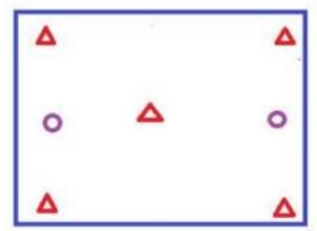
控制点的任务就是对全局进行控制。因此布设控制点时,必须覆盖全区域。如下图中,控制点为三角形,三角形覆盖了测区。圆形为检查点。
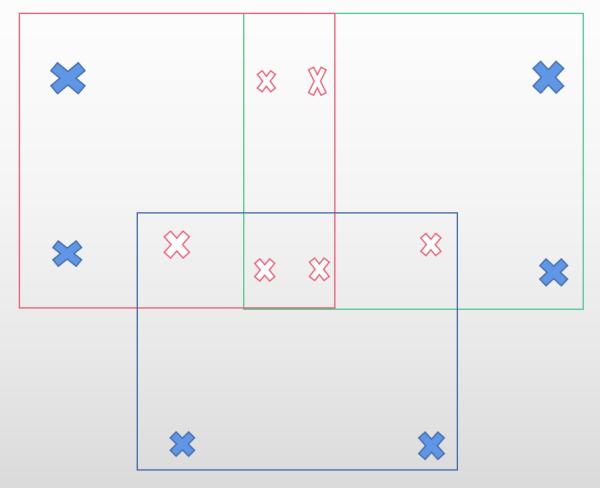
如需绝对坐标数据,则每个测站之间保证3个控制点及以上数量;如无需绝对坐标数据,则保证各测站之间有足够的区域进行拼接即可(如下图所示)。
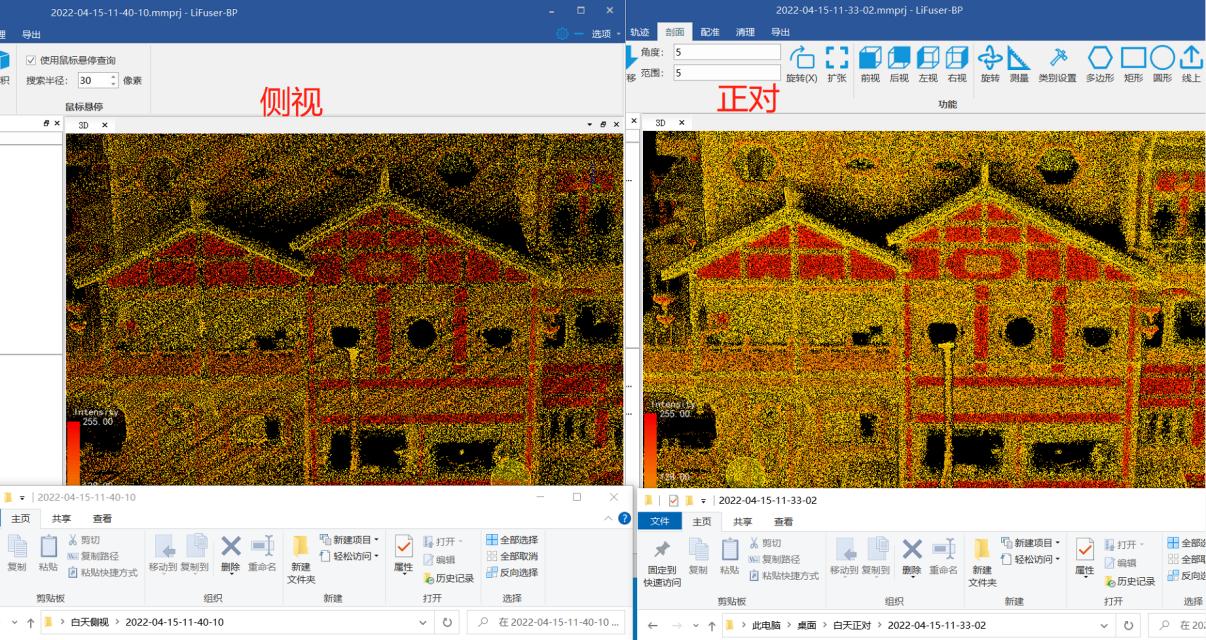
二、利用LiFuser-BP进行数据的准备
主要检查以下几项:
① 点云有无分层现象
② 点云强度是否正常
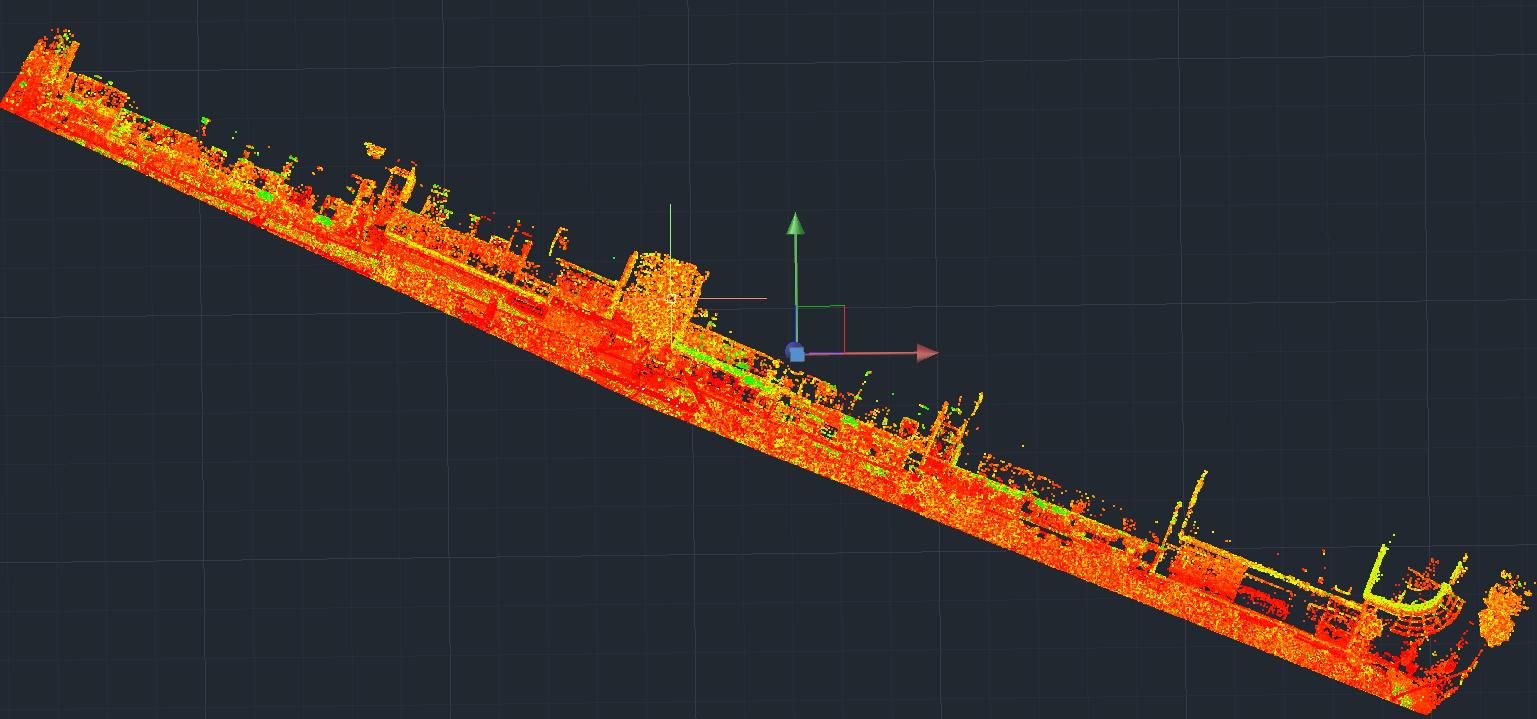
基于点云画立面依赖的是强度信息。
③ 点云精度是否满足要求
④ 点云噪声点是否去除
利用LiFuser-BP软件进行噪声点去除。
⑤ Z轴是否垂直
一般要求Z轴垂直。
2、点云的裁剪
去除边缘的无效点云,只保留测区内的点云。
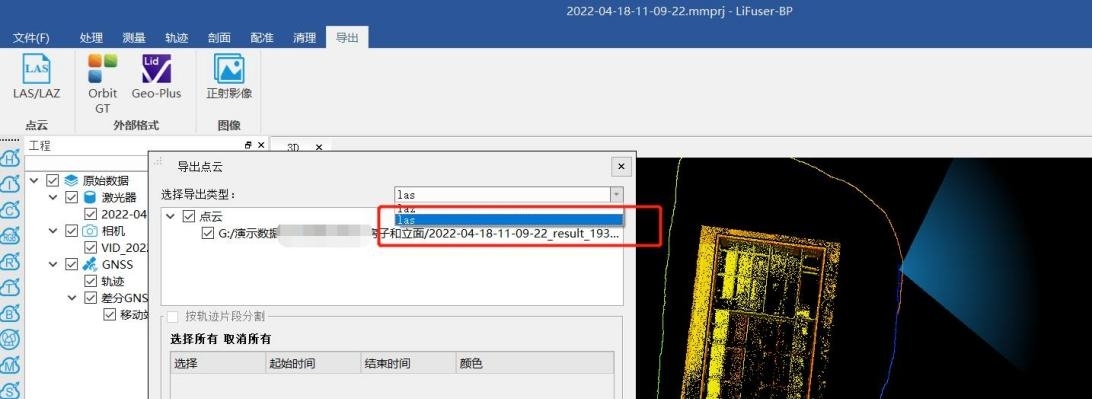
3、点云的导出
在LiFuser-BP中导出LAS数据。
三、Recap格式转换
四、导入绘制立面图的软件
 #1 点击“插入”选项卡的“附着”;
#1 点击“插入”选项卡的“附着”;
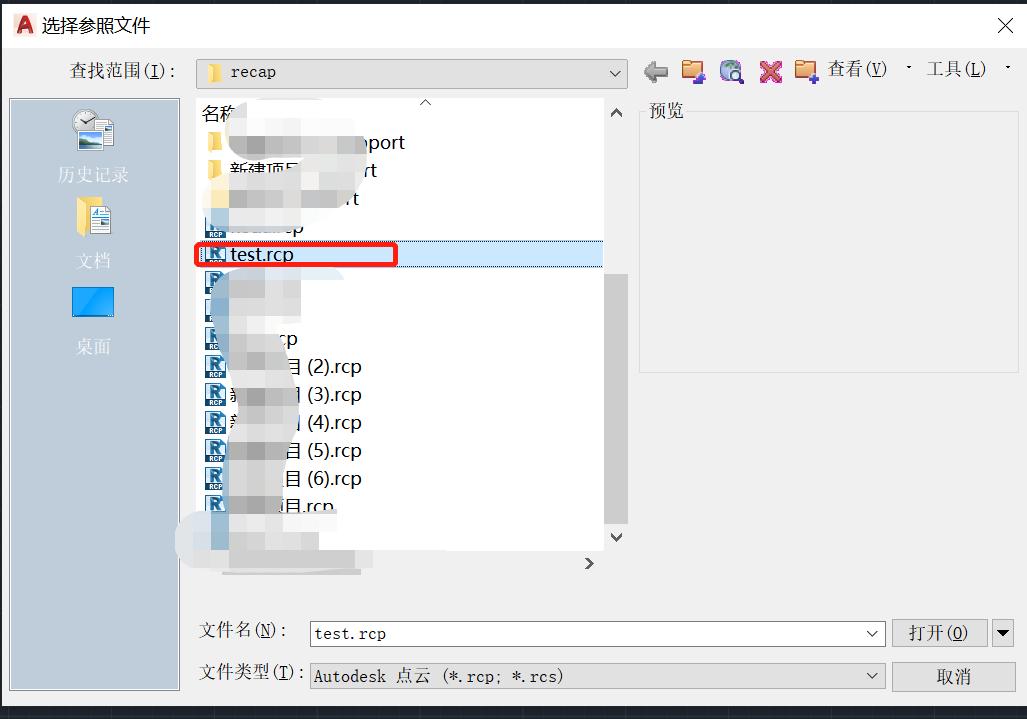
#2 选择RCP格式的点云索引文件;

#3 在“附着点云”对话框中取消勾选“在屏幕上指定”,并确保XYZ均为0(目的是确保点云的坐标符合真实的地理坐标)
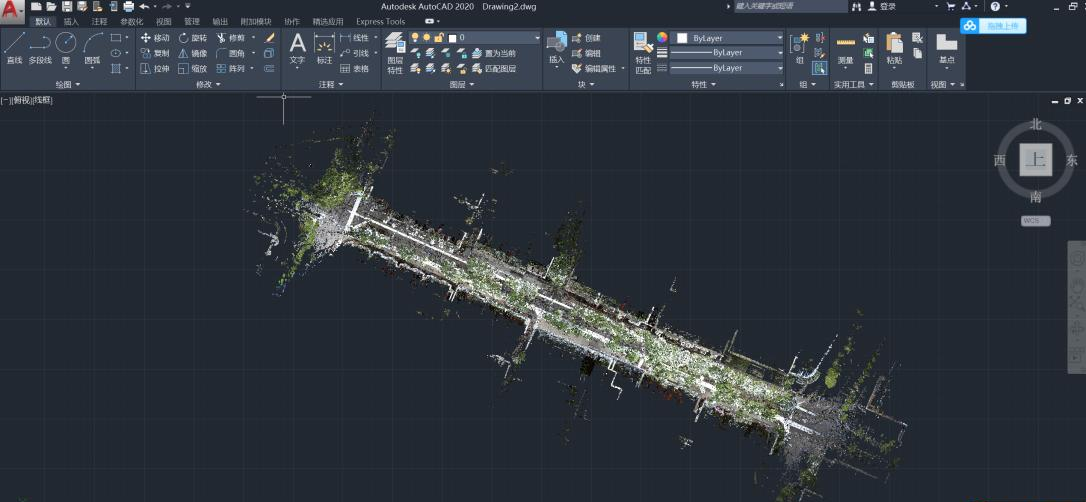 #4 导入点云成功。
#4 导入点云成功。
通常,我们单次工作只需要绘制一面的立面图,因此需要隐藏其他面的点云数据。
五、立面图绘制
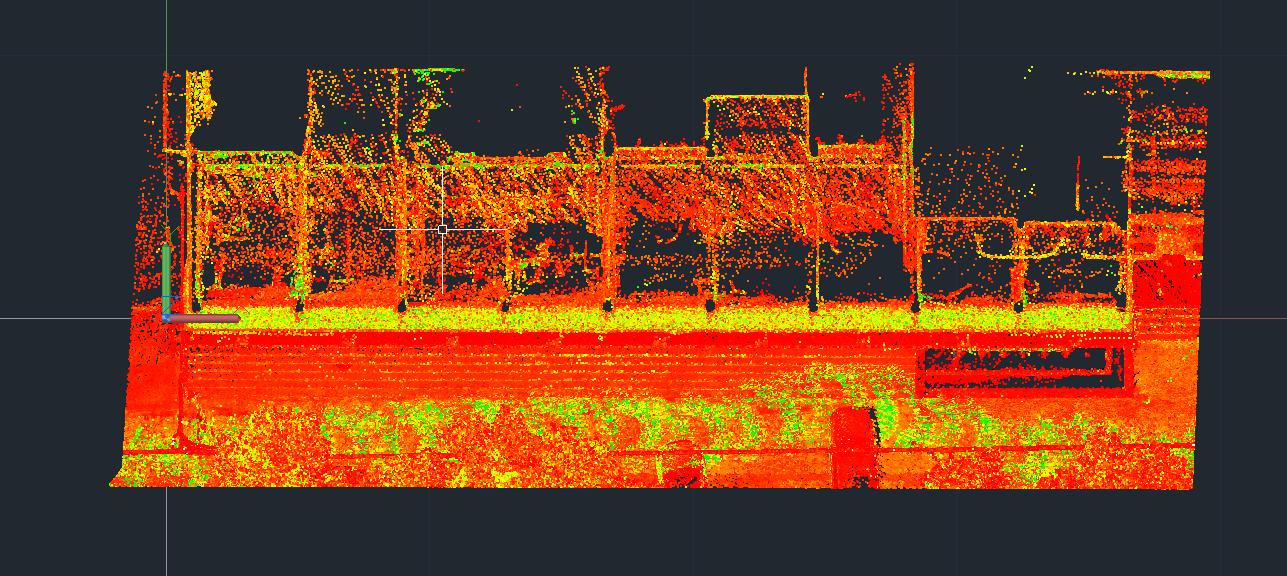
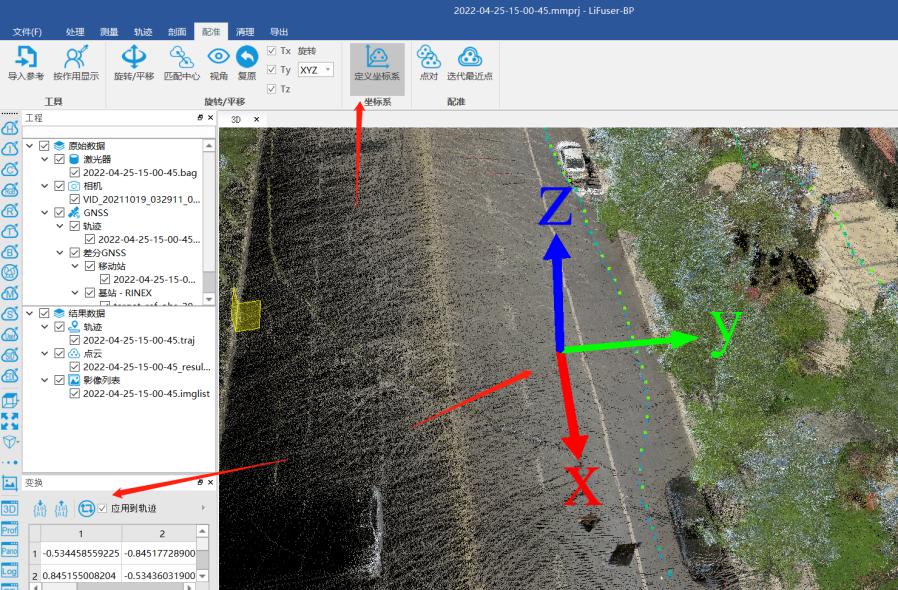
「成果展示-定义UCS坐标系」
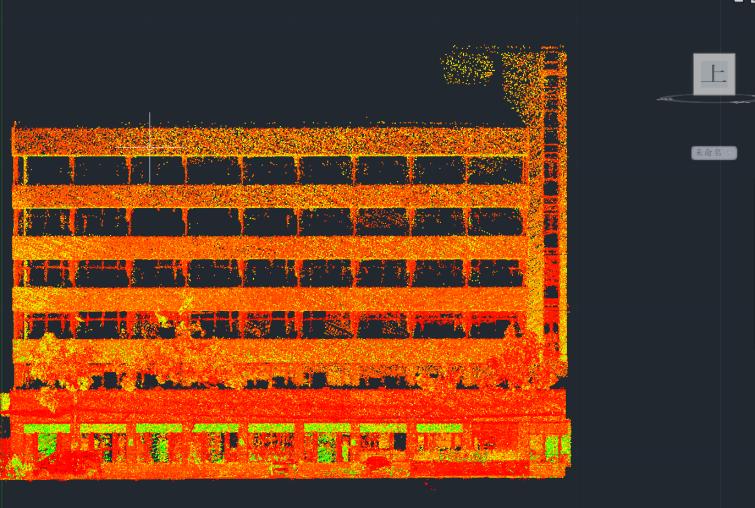
「成果展示-上视图」
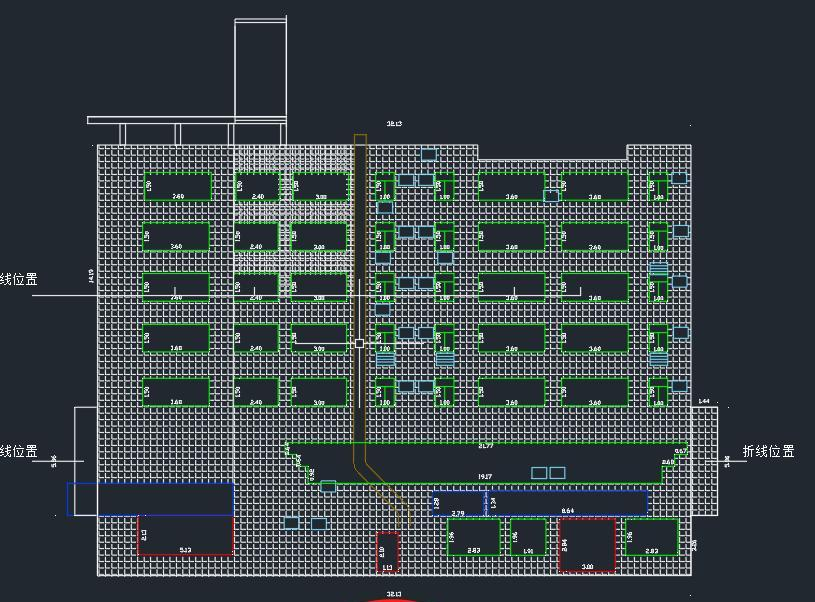
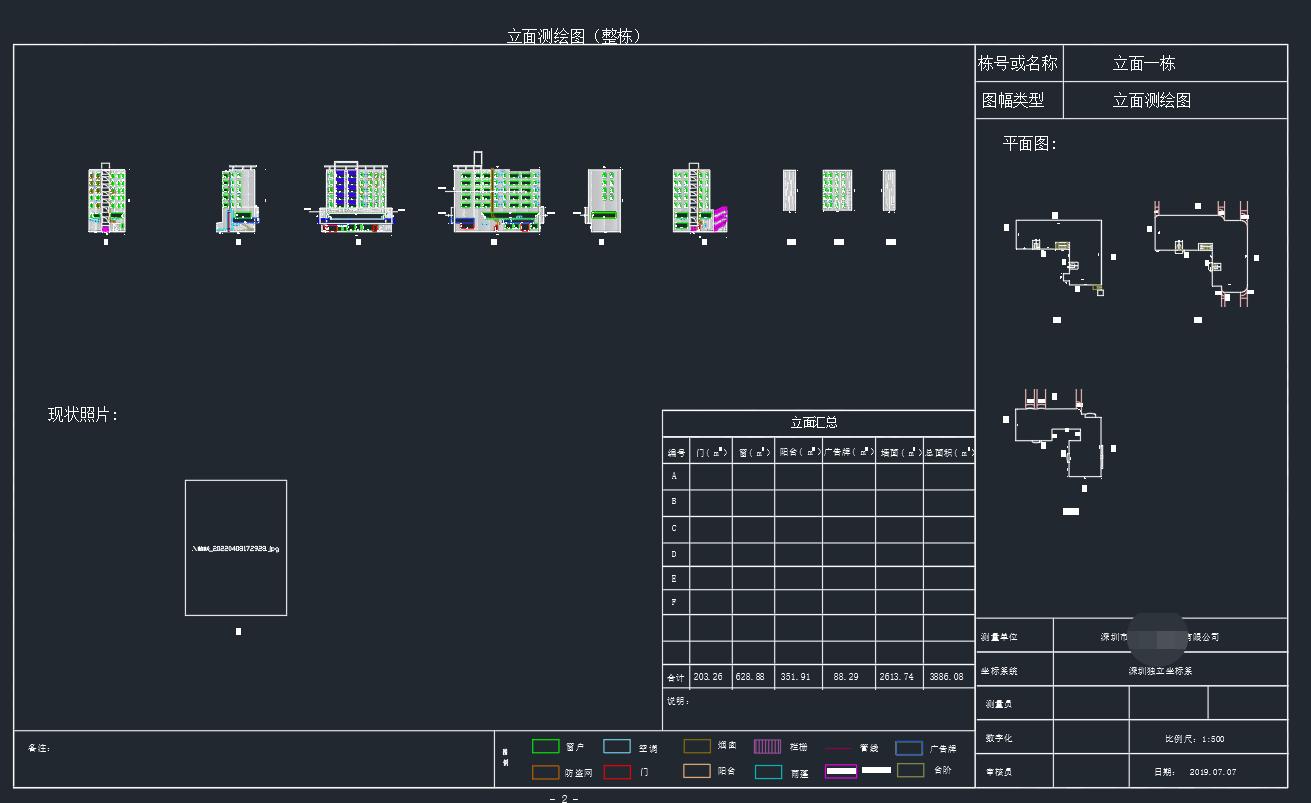
「成果展示-整饰出图」
利用激光雷达高精度的特性,获取物体真实的三维全貌,并根据智能化立面图绘制方案,可解决多行业传统的测算方法的诸多难点,夯实高精度数据质量的安全底座。