
一、渊源与区别
二者有着几乎相同的外观,且LiAir X3-H与LiAir X3一样,集成了高精度激光器、惯导、GNSS和相机。但与LiAir X3不同的是,LiAir X3-H采用更适配航飞测绘的正视结构,保证点云有稳定精度的同时,也保证DOM、DSM的快速生成和点云-影像的快速融合。
二、切磋与对比
LiDAR A与LiAir X3-H设备参数均设置为单回波、重复扫描进行扫描作业。使用数字绿土LiDAR360后处理软件将LiDAR A与LiAr X3-H点云范围裁剪保留完全相同的区域,对比分析点云数据质量。飞行轨迹如下图:
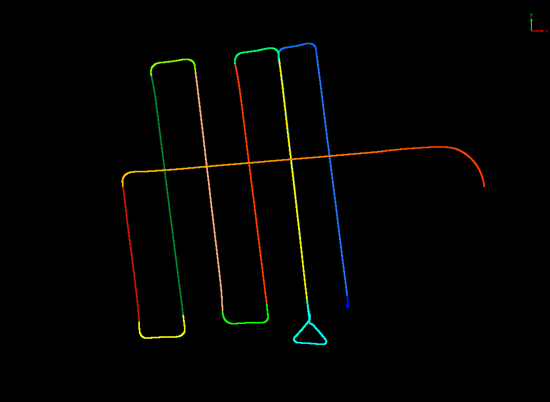
对比点云数据获取后数据解算时长(POS处理、点云解算、数据质量优化、点云赋色),LiDAR A通过配套处理软件进行处理,共耗时3分50秒,LiAir X3-H通过LiGeoreference进行处理,耗时5分37秒。这样看来,LiDAR A的解算效率更高一点。
2、点云噪声
 「LiAir X3-H数据图」
「LiAir X3-H数据图」
 「LiDAR A数据图」
「LiDAR A数据图」
3、点云分层
 「LiAir X3-H数据图」
「LiAir X3-H数据图」
 「LiDAR A数据图」
「LiDAR A数据图」
4、真彩色赋色

 「LiAir X3-H数据图」
「LiAir X3-H数据图」

 「LiDAR A数据图」
「LiDAR A数据图」
从上图可以看出LiAir X3-H的点云真彩色明度对比强烈,色彩均匀;LIDAR A点云真彩色纯度较低,建筑边缘有锐化表现。
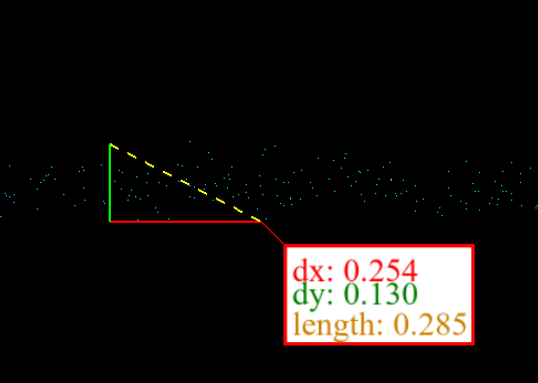
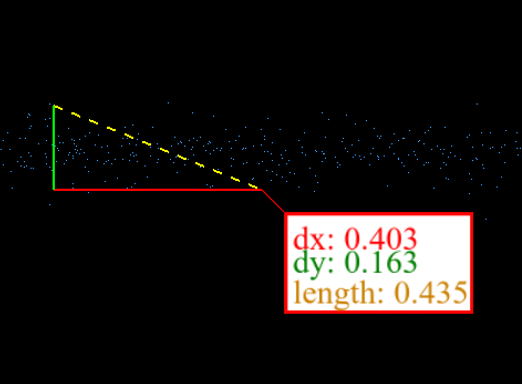
5、点云厚度
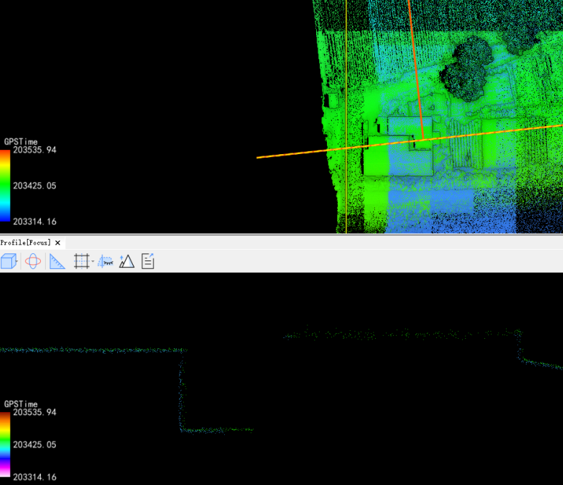
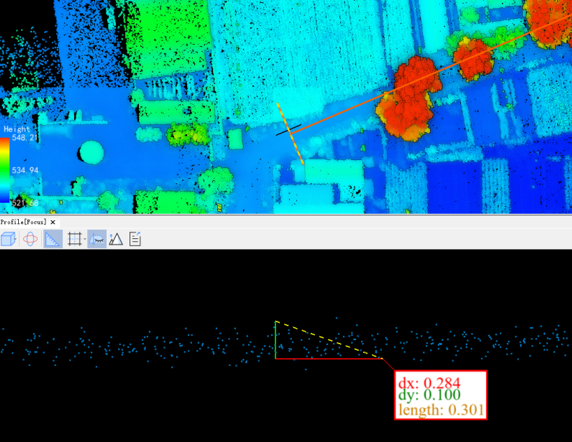
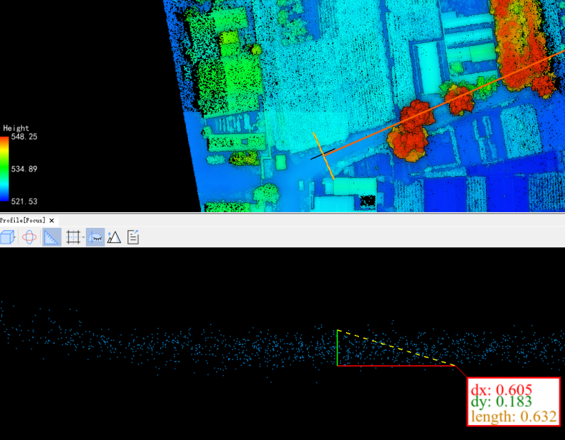
平面点云厚度是判断激光雷达性能以及点云处理算法的一个常见的指标。理想状态下,用激光雷达探测一个绝对光滑的平面(正常反射率),理论上该点云平面是没有厚度的,但实际应用中由于仪器的各项系统误差,点云解算后,激光脚点对应的测距值会有浮动。这个浮动值的大小是不固定的,体现在测量平面并成图时,就会有一定的厚度。
而这个厚度对我们测绘来讲,便会影响我们提取地形时,DEM地形点的选取。这同样也会影响,利用点云做3D建模时,模型的尺寸值的误差。在量测评判时,一般选取硬质平地或者建筑的屋顶以及侧立面的点云。
(1)建筑物屋顶
 「LiAir X3-H数据图」
「LiAir X3-H数据图」
 「LiDAR A数据图」
「LiDAR A数据图」
 「LiAir X3-H数据图」
「LiAir X3-H数据图」
 「LiDAR A数据图」
「LiDAR A数据图」
6、单航带点密度
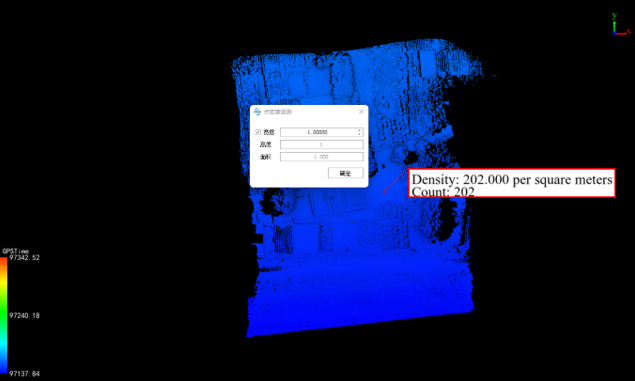 「LiAir X3-H裸露地表(202points/m²)」
「LiAir X3-H裸露地表(202points/m²)」
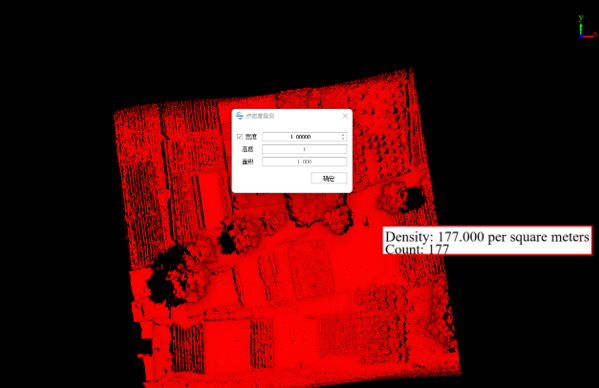 「LiDAR A裸露地表(177points/m²)」
「LiDAR A裸露地表(177points/m²)」
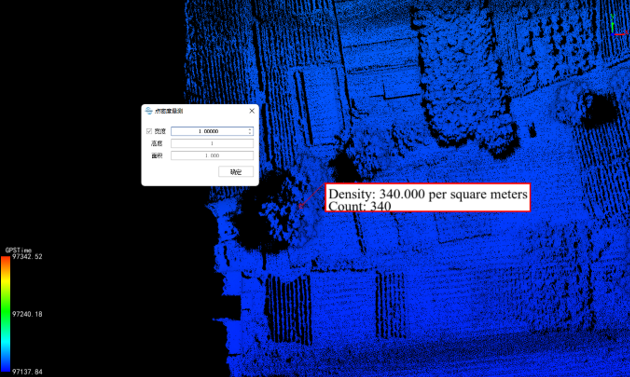 「LiAir X3-H丛林树冠(340 points/m²)」
「LiAir X3-H丛林树冠(340 points/m²)」
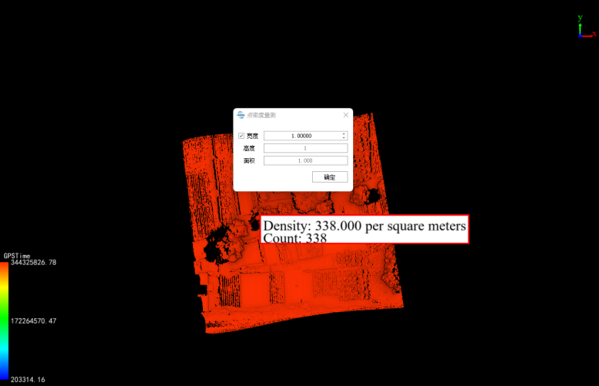 LiDAR A丛林树冠(338 points/m²)
LiDAR A丛林树冠(338 points/m²)
用RTK在测区打点,用于验证二者数据的绝对坐标精度情况。此次有26个控制点参与精度验证计算,控制点分布及验证情况如下。

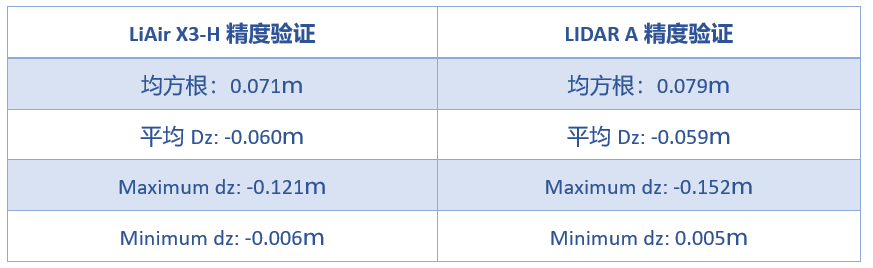
可见,在航高100m条件下,LiAir X3-H高程中误差为0.071m,LiDAR A数据高程中误差为0.079m,均满足1∶500地形图高程精度要求。
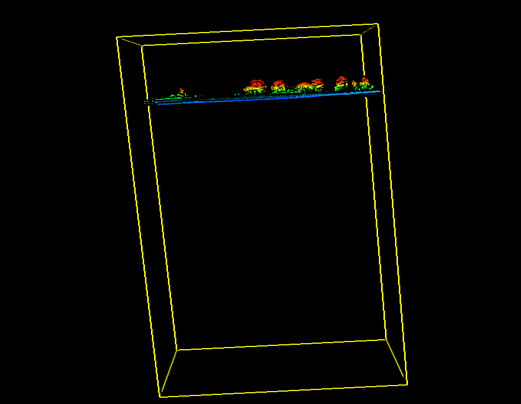
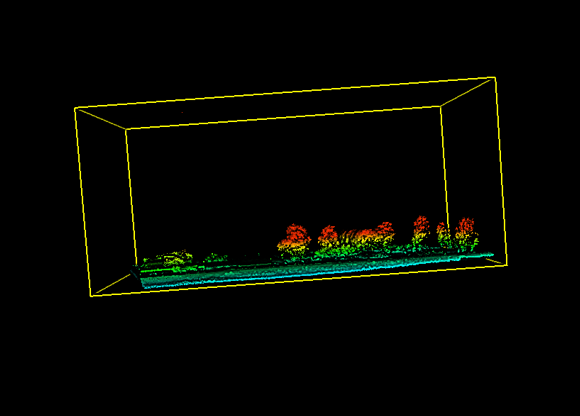
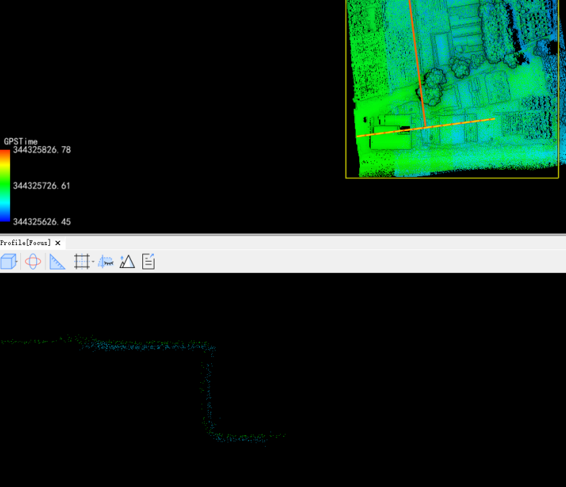
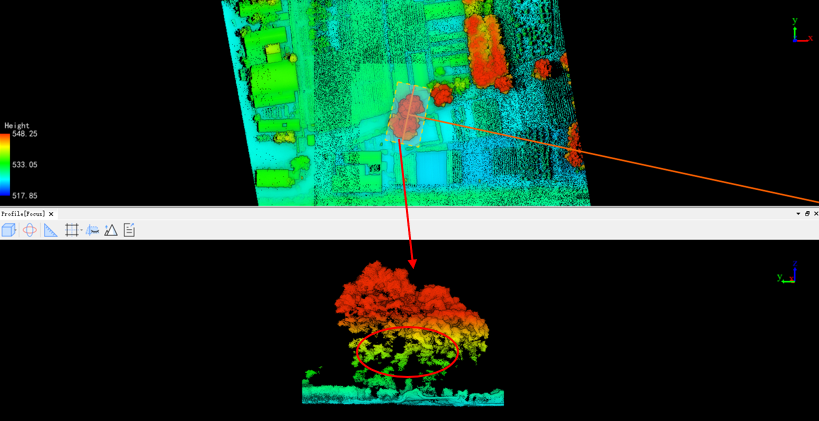
8、下层树冠扫描
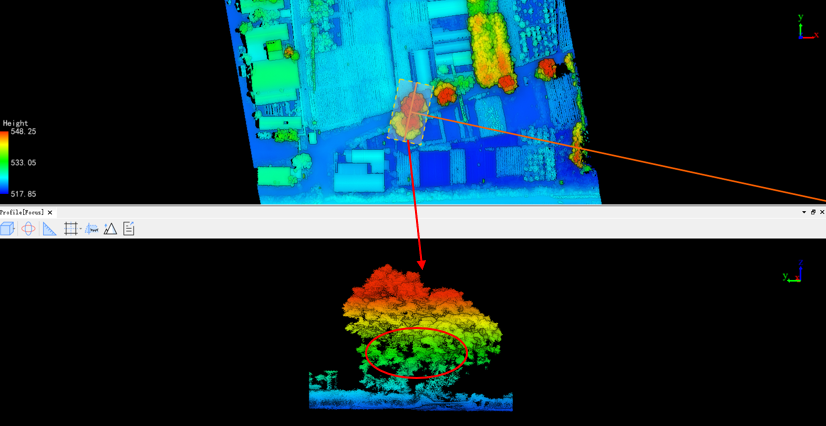
我们选取同一棵树的点云切剖面,观察下层树冠部分,可看出LiAir X3-H下层树冠数据点密度更高,点云更为完整。这是由于LiAir X3-H默认为三回波,可以穿透树层,获取更多的树冠与地表信息。
树冠的层次丰富度和完整度,影响着林业应用中植被垂直结构信息的获取。越丰富的和完整的信息,意味着林业参数的提取也会有更好的精度。
 「LiAir X3-H数据图」
「LiAir X3-H数据图」
 「LiDAR A数据图」
「LiDAR A数据图」
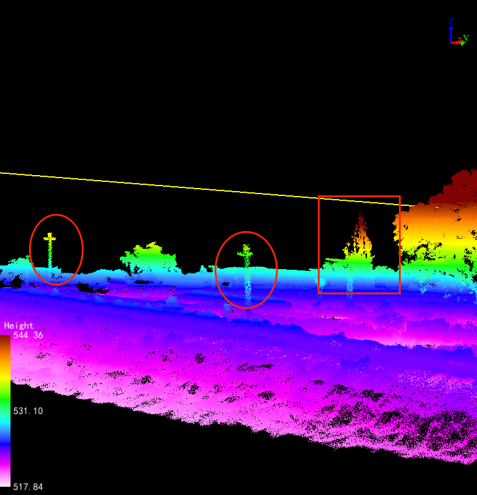
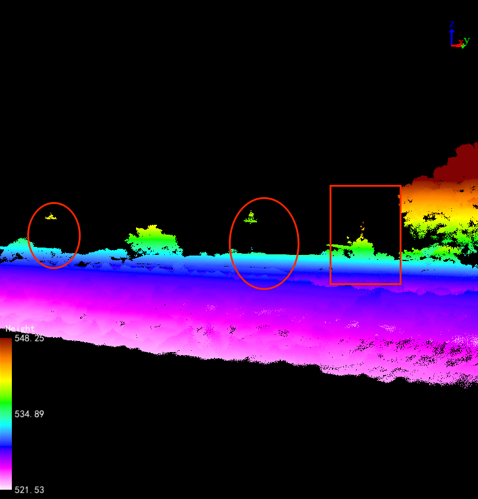
地物的完整度影响着地物信息普查和三维模型构建的精度和效率,在实景三维应用中尤甚。例如城市关键部件的普查和建模,电杆、路灯等,在做多平台数据(空基、地基)融合时,这些都是很重要的特征地物,对于最终的普查结果而言更是重要统计目标。
我们将LiDAR A和LiAir X3-H数据显示在不同窗口,通过窗口联动功能将两组点云缩放旋转到同一角度,查看不同地物的完整度,对比效果如下。

 「LiAir X3-H数据图」
「LiAir X3-H数据图」
 「LiDAR A数据图」
「LiDAR A数据图」
 「LiAir X3-H数据图」
「LiAir X3-H数据图」
 「LiDAR A数据图」
「LiDAR A数据图」
接着再旋转点云查看,可看出缺失的地物还有电力线杆塔和植物树冠,LiAir X3-H的点云数据中,杆塔与植物树冠扫描完整,LiDAR A只能获取塔杆的顶部数据,且有部分树冠顶部数据会缺失,会存在关键信息遗漏的可能性。
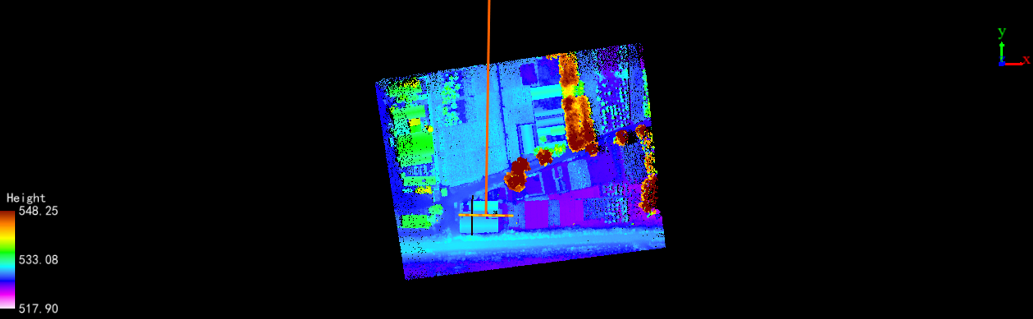
10、地面点分类与DEM成果对比
地面点分类和提取效果的好坏,将直接影响到后续地形产品的生产的优劣,连带影响到所有因此而衍生的行业应用,故该项也是很重要的考察指标。
用LiDAR360进行地面点滤波,LiAir X3-H分离出的地面点数为47259个,LiDAR A分离出的地面点数为42685个。之后,设置栅格大小为0.5米,来生产DEM。
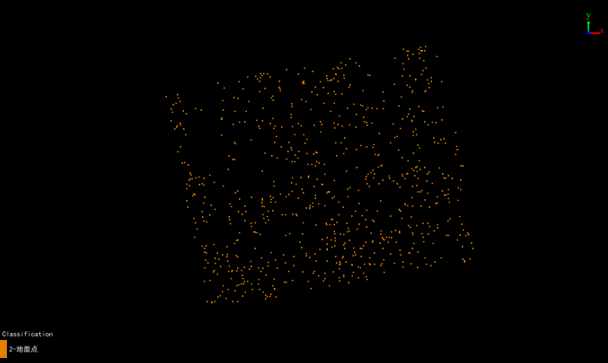 「LiAir X3-H地面点分离结果」
「LiAir X3-H地面点分离结果」
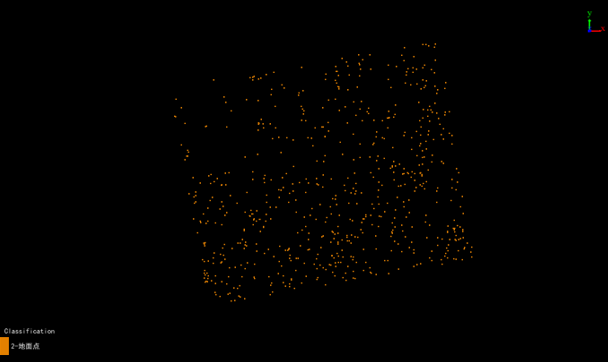 「LiDAR A地面点分离结果」
「LiDAR A地面点分离结果」
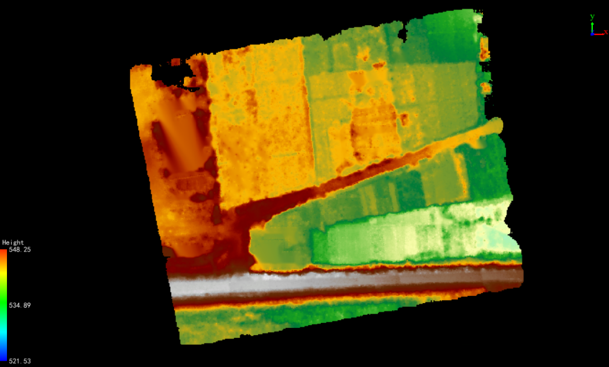 「LiAir X3-H生成的DEM」
「LiAir X3-H生成的DEM」
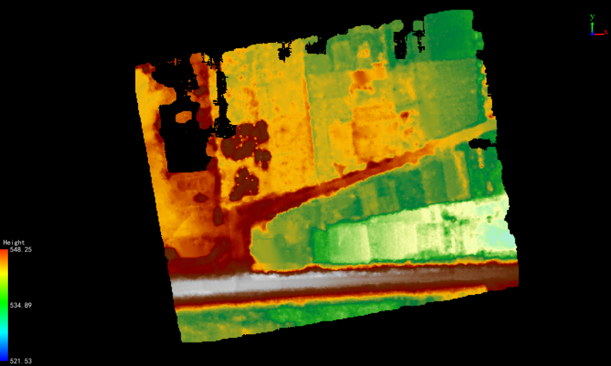 「LiDAR A生成的DEM」
「LiDAR A生成的DEM」
● 由于两款产品搭配的激光传感器相同,设置同样设备参数时LiDAR A与LiAir X3-H 点密度和点云厚度没有明显差别,航带重叠区域LiAir X3-H未见明显分层,LiDAR A有显著的厚薄相间表现;
● 在保持默认参数的情况下,LiAir X3-H的数据效果整体优于LiDAR A,提取参数建立模型都好一点,并且LiAir X3-H可以适配其他厂商无人机,对于采集作业场景的宽容度也更高,可适配测绘行业的多种应用。
● 但对于数据解算效率以及噪声点情况来说,LiDAR A有着更好的表现,这也将是我们后续的优化方向之一,请拭目以待。