
 整体方案流程:确定作业区域→ 路径规划→ 数据采集→ 数据导出→ 点云解算→ 提取溶洞点→ 三维建模、断面分析、平面分析1、准备工作首先应当勘察溶洞,规划分区和路径等。
整体方案流程:确定作业区域→ 路径规划→ 数据采集→ 数据导出→ 点云解算→ 提取溶洞点→ 三维建模、断面分析、平面分析1、准备工作首先应当勘察溶洞,规划分区和路径等。
准备卷尺、胶带、麻绳、3M反射条或红布等醒目标志物进行放置 ,其目的是用来增加特征点,使其点云能够拼接的更好,提高模型质量。
2、路线规划
对于由室外进入溶洞的场景,面向洞口初始化后,直接进入溶洞内沿溶洞进行量测,尽量走闭环路线。遇到测区较大或者障碍物时候,可以采取分区、分次进行测量。
3、数据采集
(1)安装好设备,相机开机、设备上电,选择一个开阔的位置进行设备初始化,初始化时激光器尽量冲着洞口;
(2)初始化完成后,缓慢拿起设备,按照规划好的路线进行数据采集,采集过程中设备尽量保持稳定;
(3)数据采集完成后,握紧设备原地不动,等待激光器停止转动,激光器数据采集结束,手动按相机按键停止录制;
(4)使用数据传输线连接电池盒与电脑端,设置电脑IP,将采集的数据成果导出。
4、数据处理
将数据拷贝到电脑端,运用LiFuser-BP打开.bag文件,根据场景进行参数修改后进行数据处理。
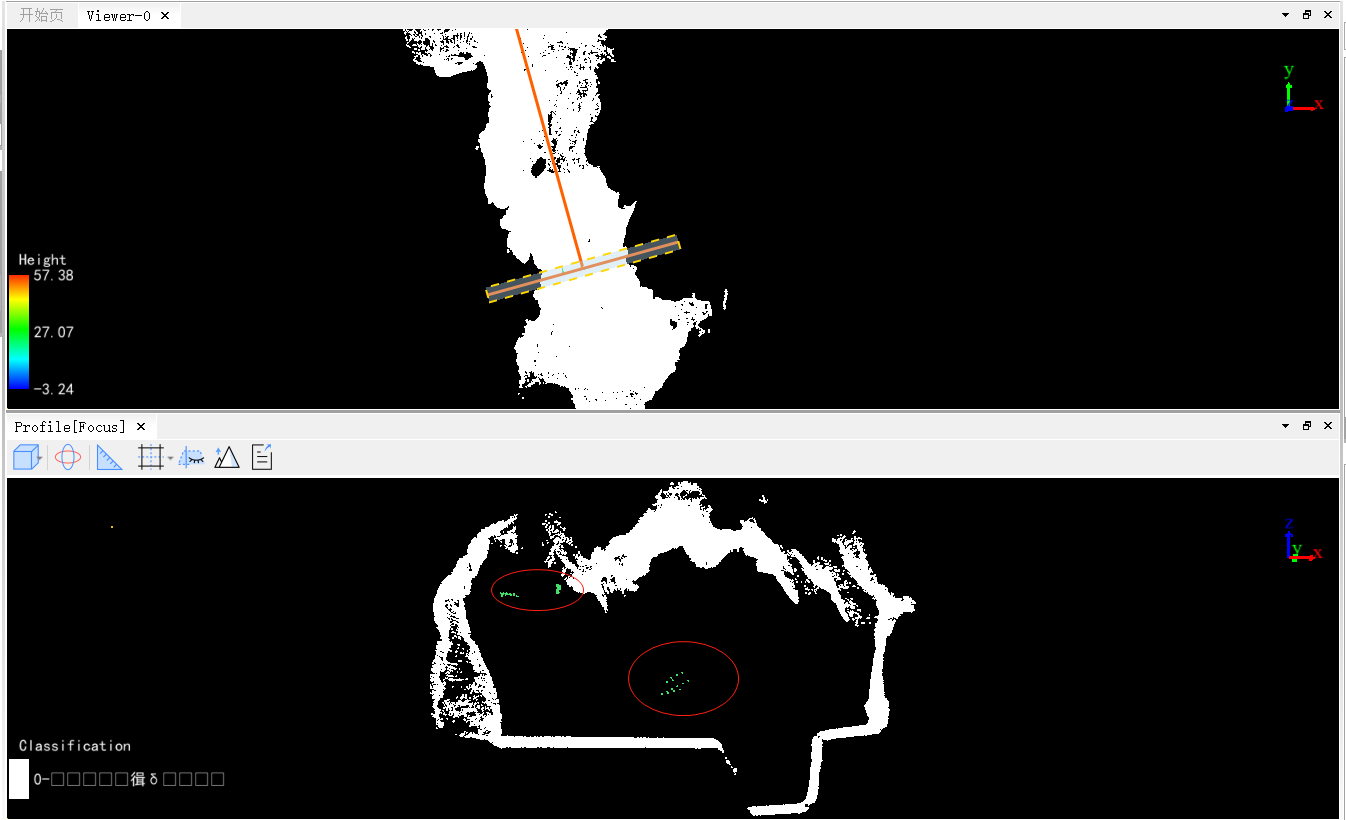 「手动去噪」
「手动去噪」
 「去噪前」
「去噪前」
 「去噪后」
「去噪后」
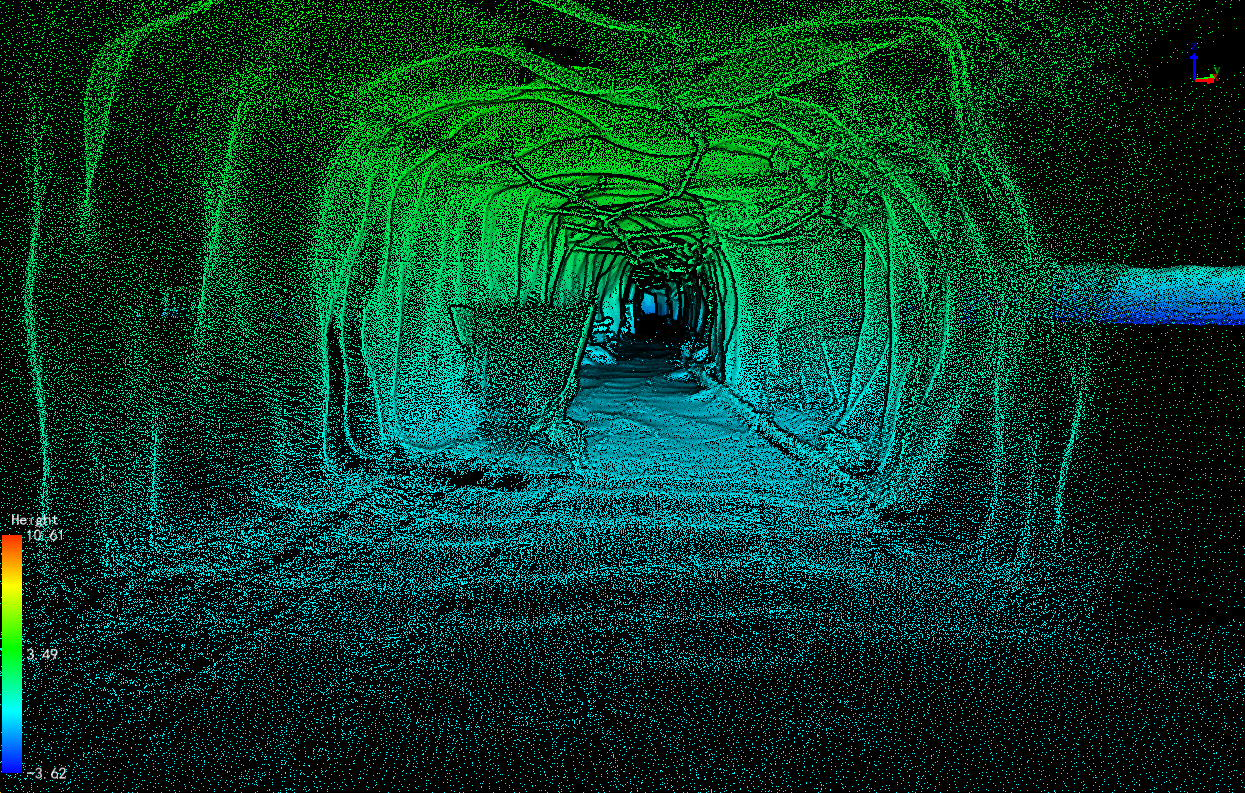
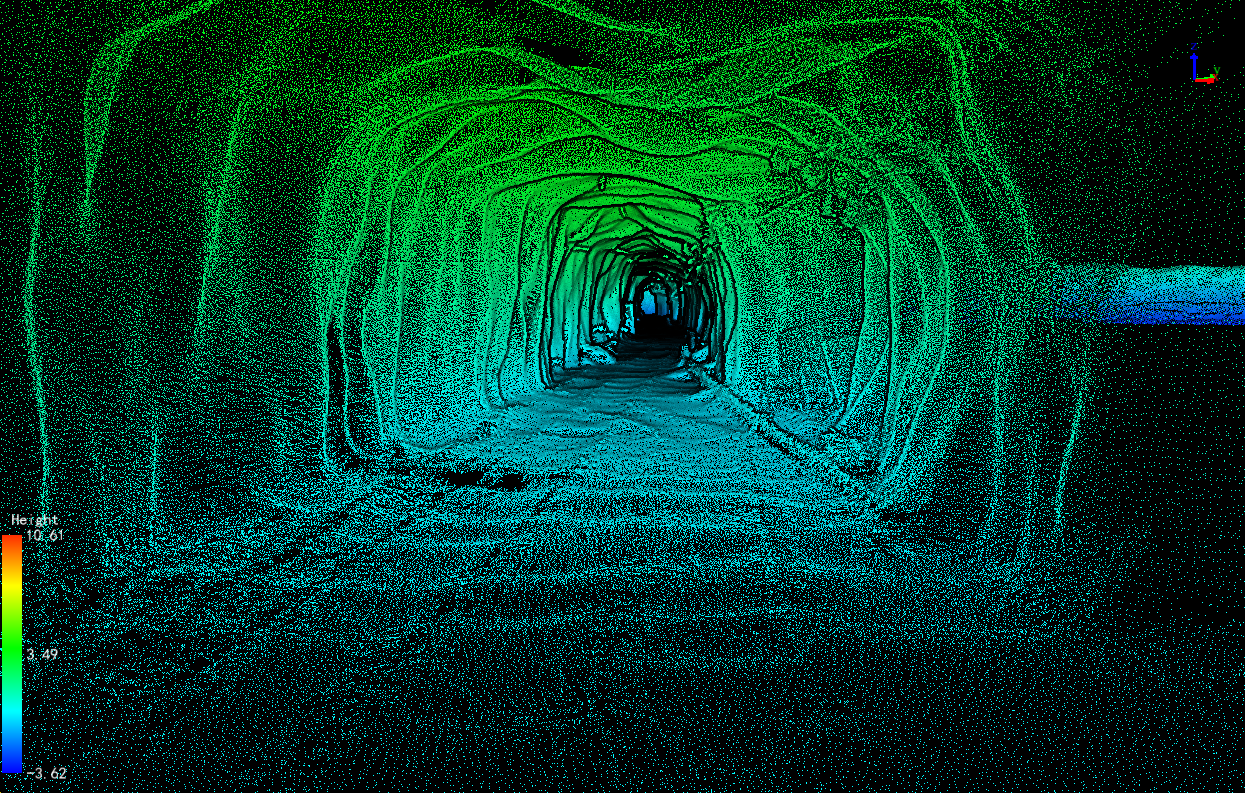
 「三维点云模型」
「三维点云模型」

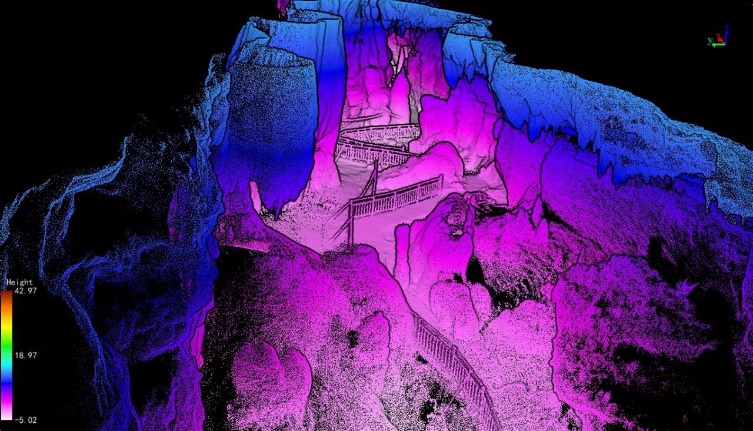
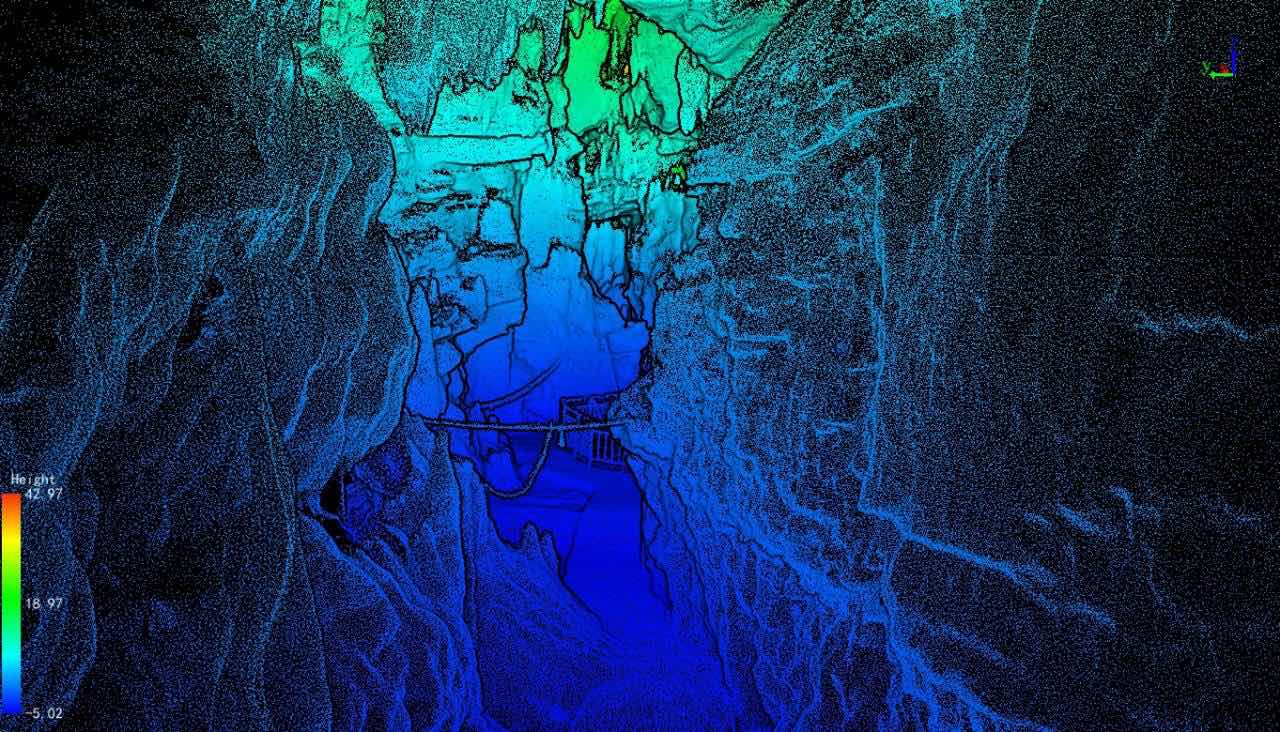
 「细节图」
「细节图」
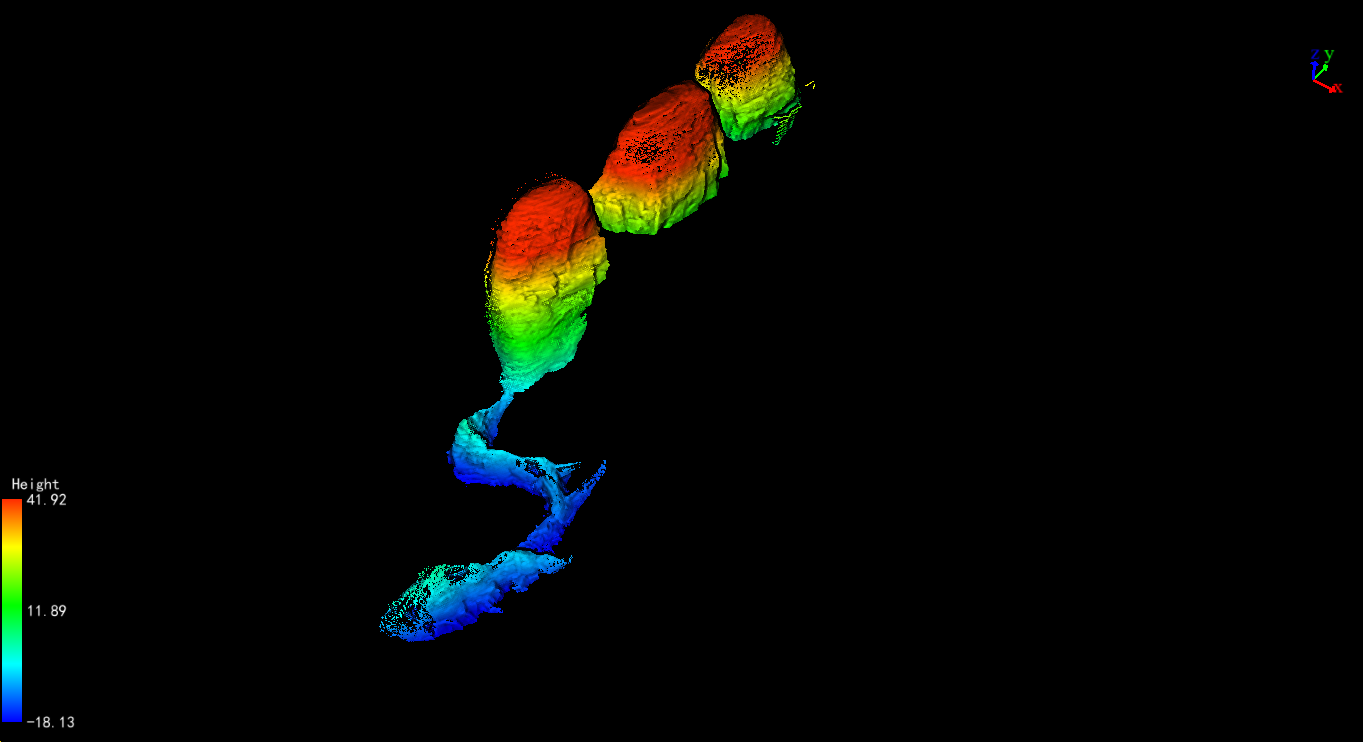
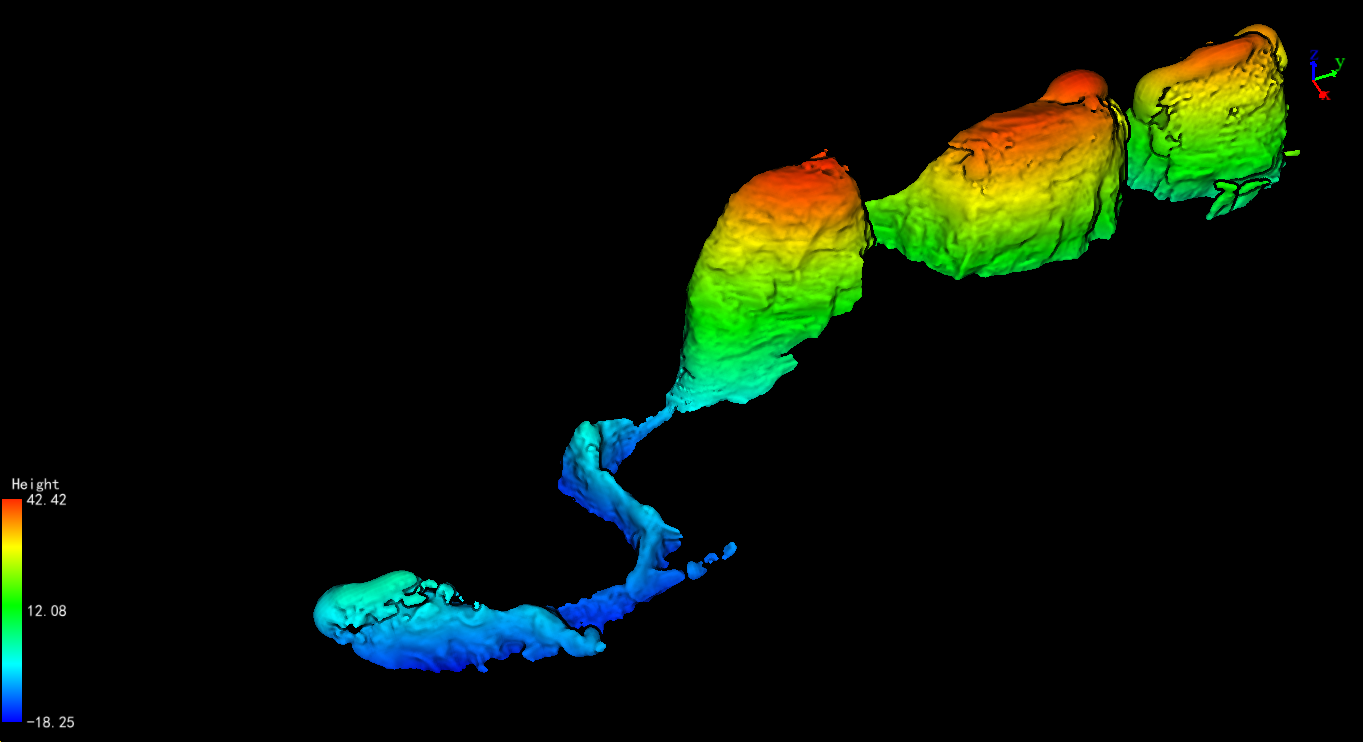 「三维模型成果图」
「三维模型成果图」
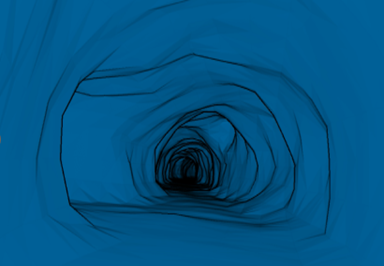 「模型细节图」
「模型细节图」

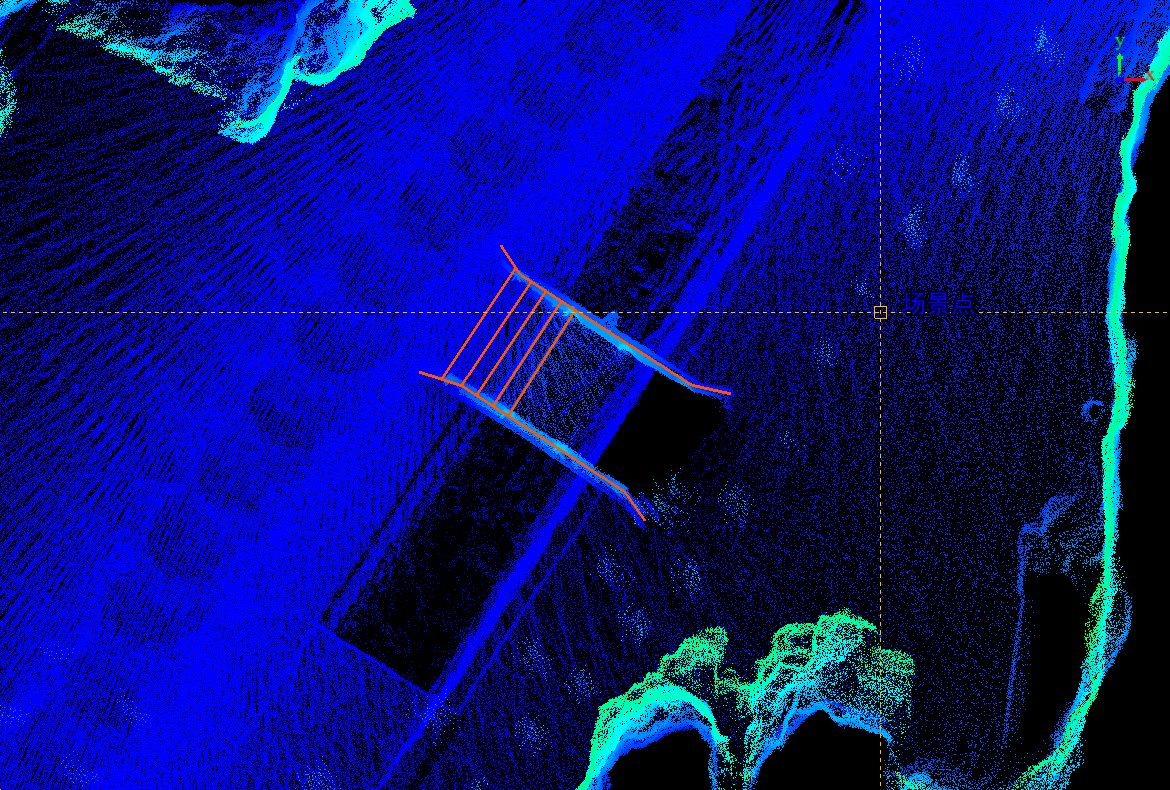 「溶洞内地物-楼梯」
「溶洞内地物-楼梯」
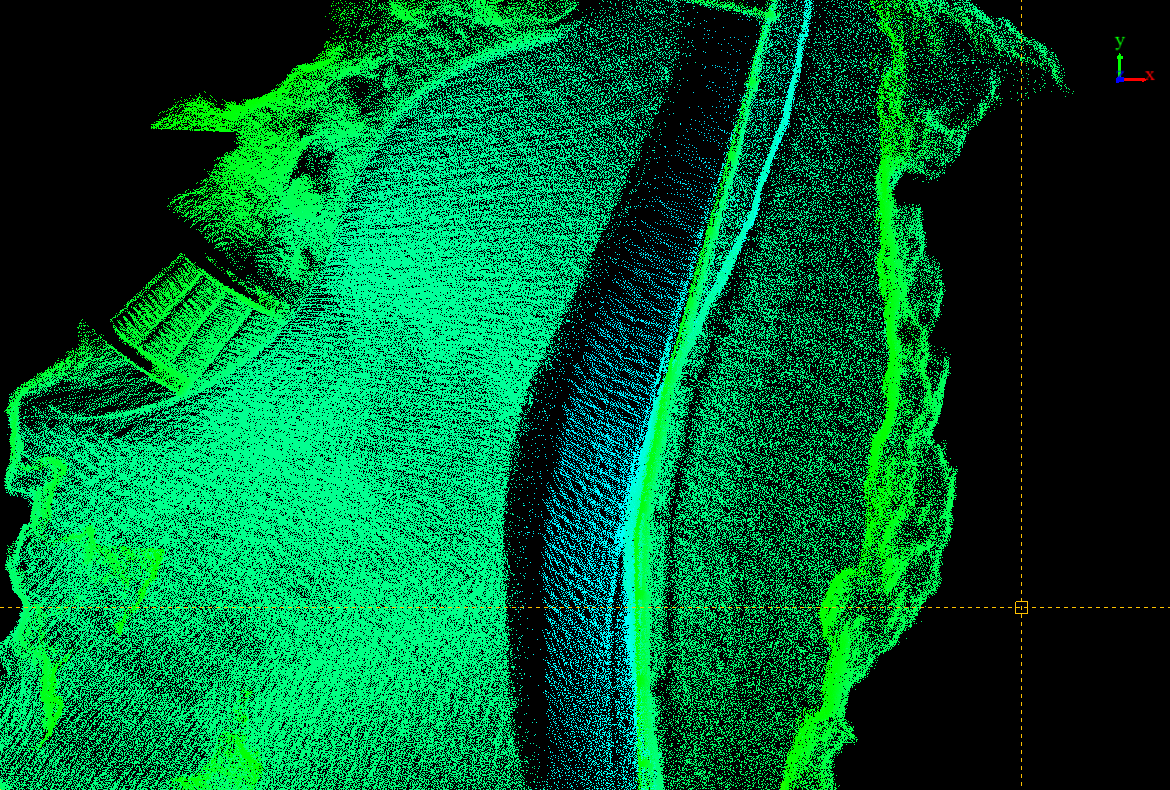
 「溶洞内地物-路」
「溶洞内地物-路」