
背 景
在实景三维中国建设的指导方向下,发展新型基础测绘,实现二维向三维的建设转变是一条必经之路。为满足地理场景与地理实体智能化全息测绘需求,除了传统的测量采集方式外,三维激光(如车载、架站和3D SLAM)扫描系统已成为新型基础测绘主要的采集技术手段。基于多源地理场景数据,利用智能处理技术可实现全要素的地理实体智能提取与生产,形成“实体化、三维化、语义化、结构化”及“高自动化、低人工干预、高精度”的新型基础测绘成果,可助力城市建筑、基础设施、道路及部件等地物要素的智能实体化与语义化的实现。
针对全要素地理实体智能提取等生产需求,数字绿土潜心研发,推出地面移动激光点云影像通用处理平台——LiDAR360 MLS三维要素提取及分析软件(原LiStreet)。作为LiDAR360家族一员大将,LiDAR360 MLS将更专注于地面移动激光点云与影像数据的处理和分析,支持对市面90%以上地面移动激光雷达设备获取的三维数据进行数据质量改善、基于AI的要素自动提取、矢量编辑、道路分析等,形成了完整的点云数据处理、高精地图、城市部件普查与道路分析等生产链。
重 点 升 级 优 化 功 能
一、基础平台
- 支持市面上90%以上车载、手持、背包等移动测量系统(Trimble,Leica,Riegl,Orbit等格式)的点云和全景数据接入软件进行处理与测图
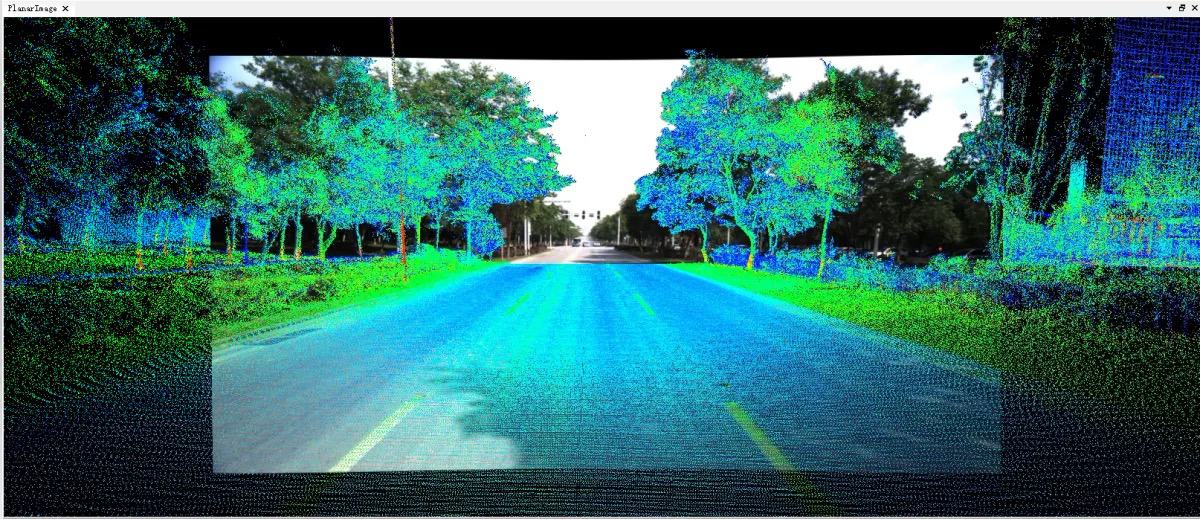
- 支持多个单目相机数据叠加点云显示、浏览、量测
- 多属性组合显示,搭配附加属性,满足更多应用需求

- 基于AI的点云语义分割算法,可快速获取高精度成果,加快后续生产分析效率

- 支持矢量成果数据入库,方便管理与格式转换
二、地图要素
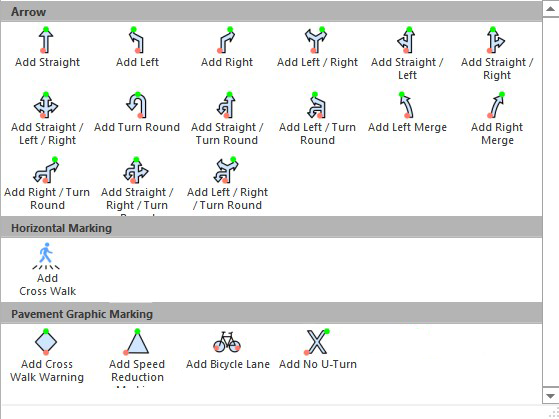
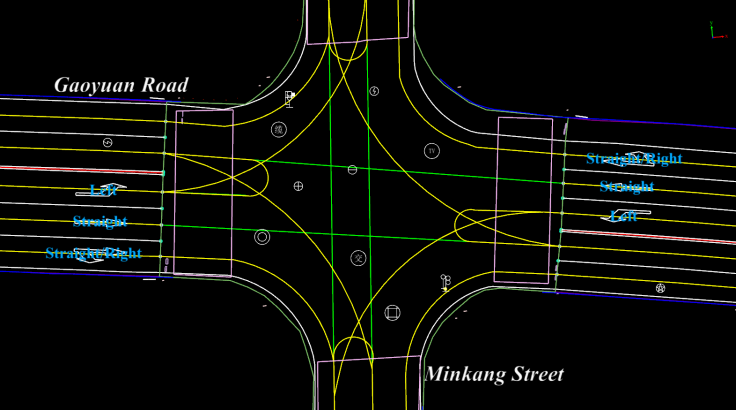
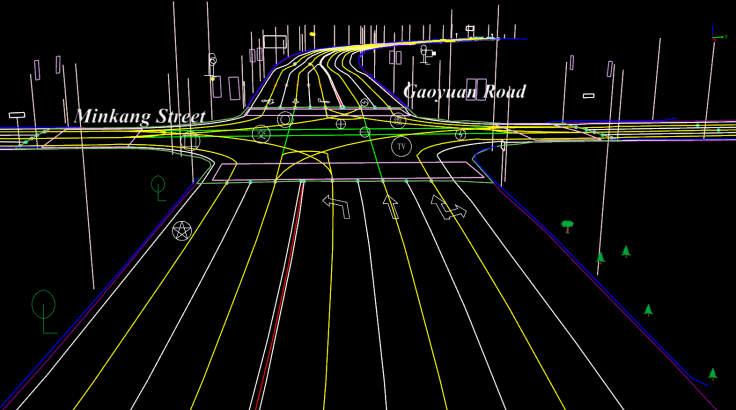
- 基于AI方式的道路要素自动提取,支持20类道路标识的三维轮廓全自动识别且识别精度优于80%

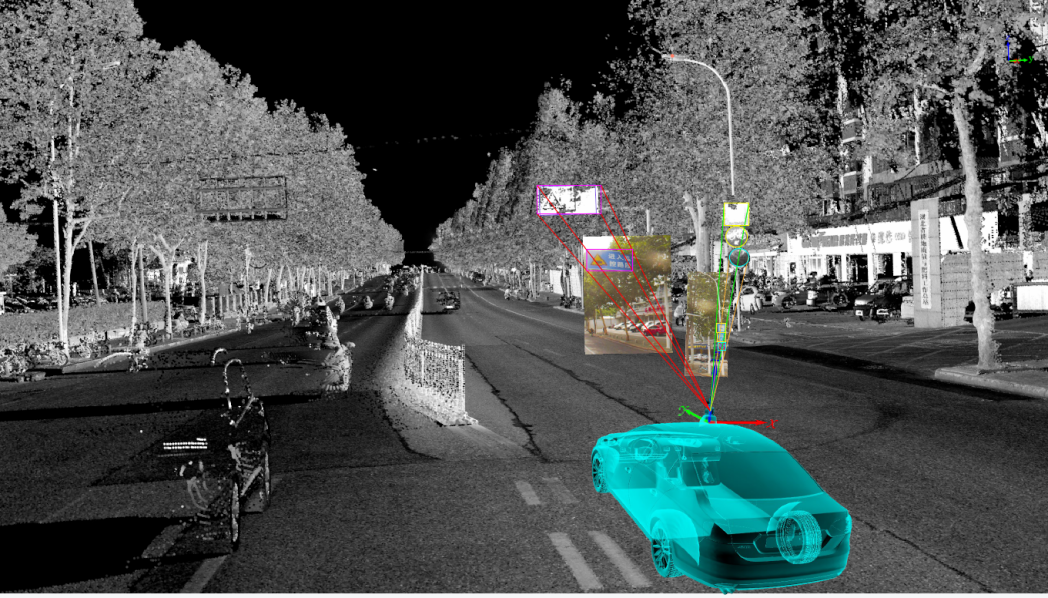
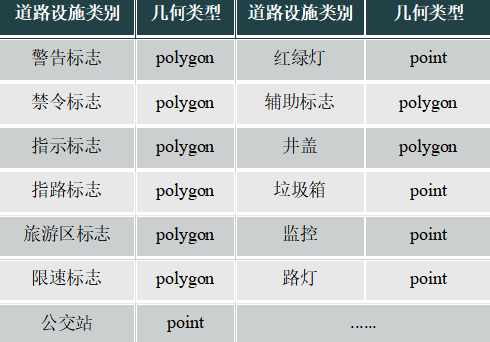
- 数字绿土自主研发了一种融合点云和影像的道路设施的三维自动提取方法,实现10余种道路设施的语义、三维几何、形状等信息的全自动识别,识别精度优于80%,且可快速扩充类别

- 支持带状地物要素提取模板,实现带状要素批量提取

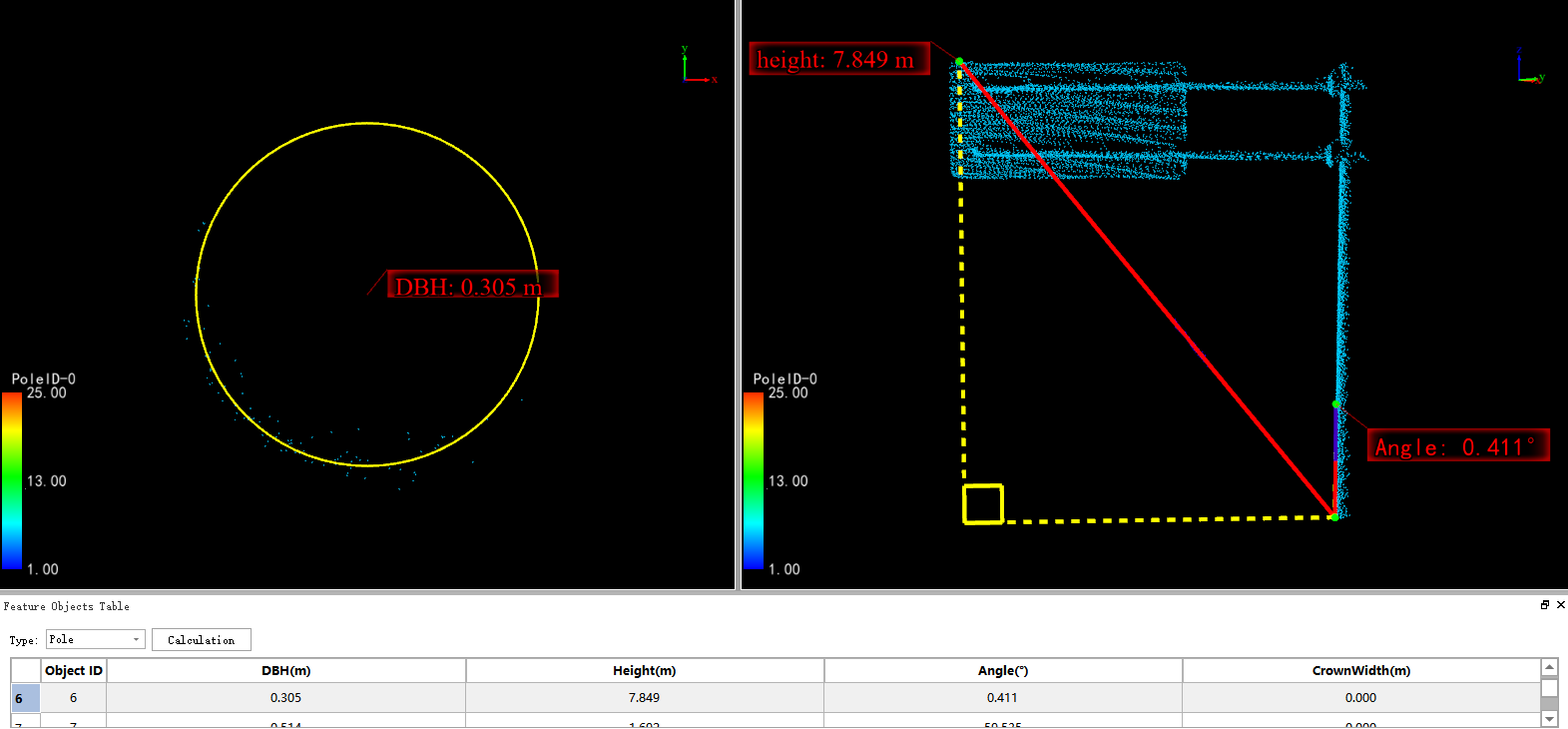
- 支持树、杆等道路设施的单体化及其参数提取

三、车载点云预处理
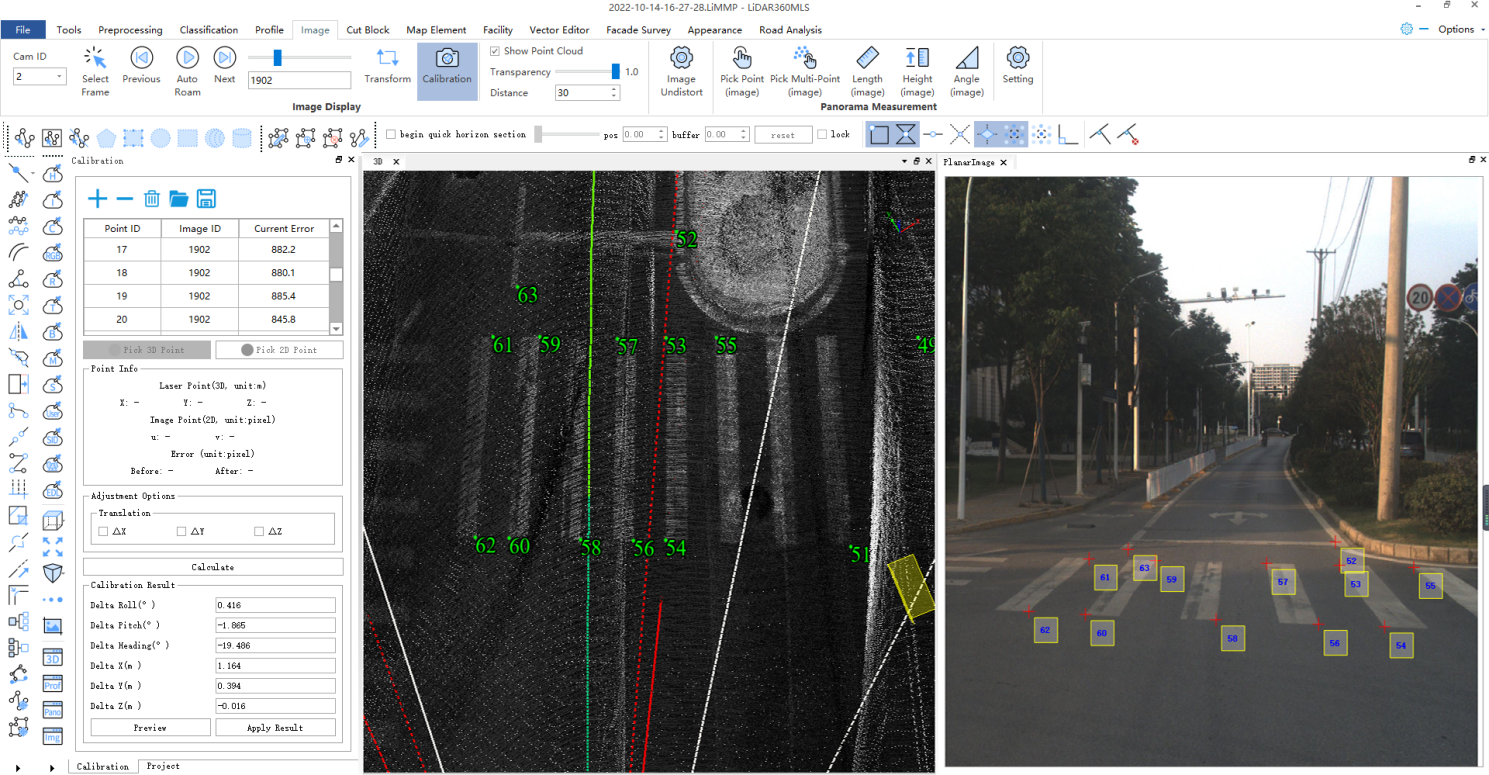
- 支持激光点云外参标定,全景/单目相机外参标定,设备无须返厂检校
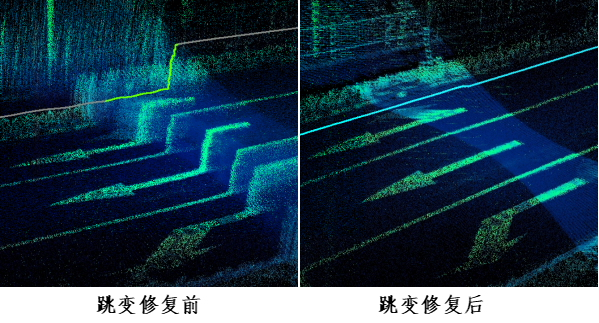
- 支持车载激光点云和轨迹精度分析,自动识别轨迹诸如跳变等异常情况并修复
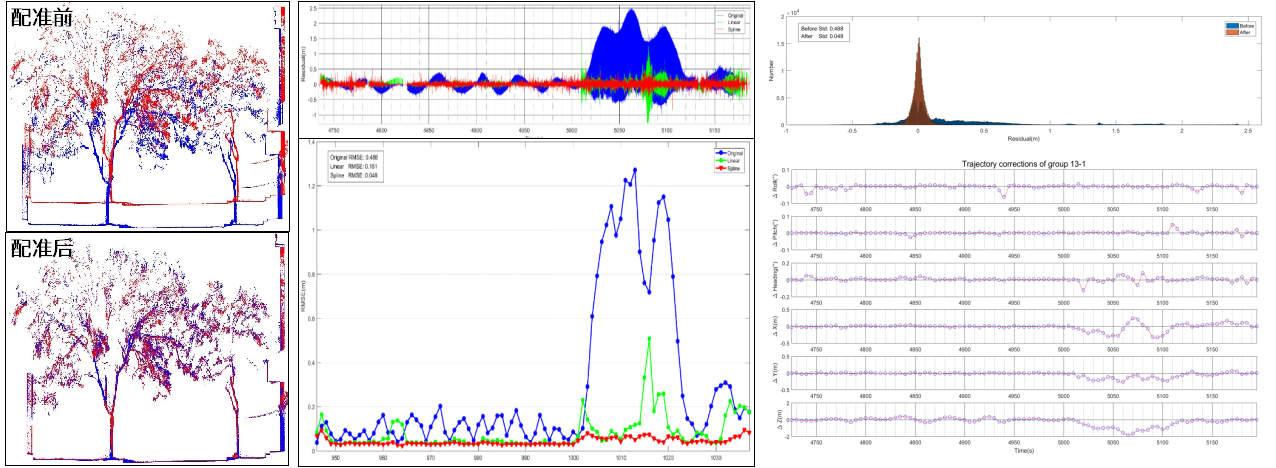
- 支持车载数据的相对拼接、多工程全局优化及控制点联合平差,输出详细的精度报告,为后续应用提供高精度数据支撑

四、矢量编辑
- 内置国家标准部件普查符号库与通用符号库,具有完备的采编库一体的道路信息化采集方案
- 支持点云、要素、节点/边多级别数据添加注记
五、道路分析
- 基于高精度车载激光点云数据,可快速获取路面裂缝信息,辅助道路养护检查
- 支持净空分析、可视域分析等三维分析方法

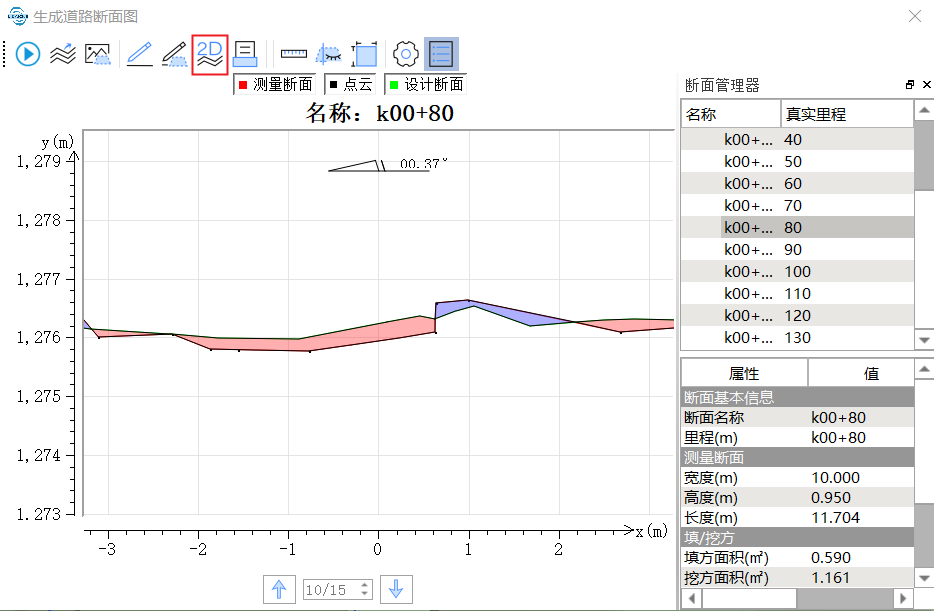
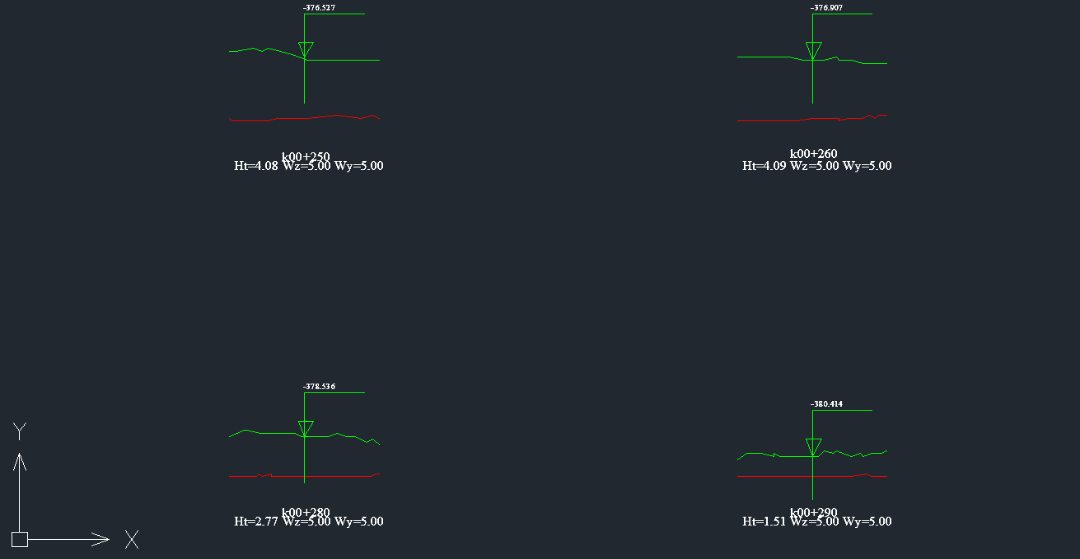
- 支持道路断面分析,可对多期数据进行对比,生成标准的对比报告
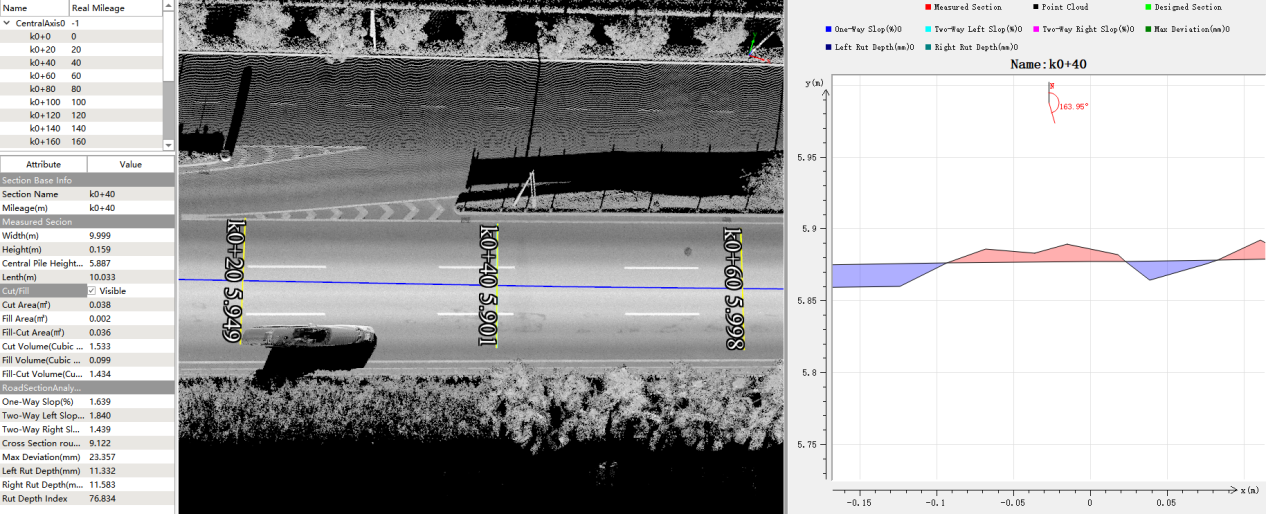
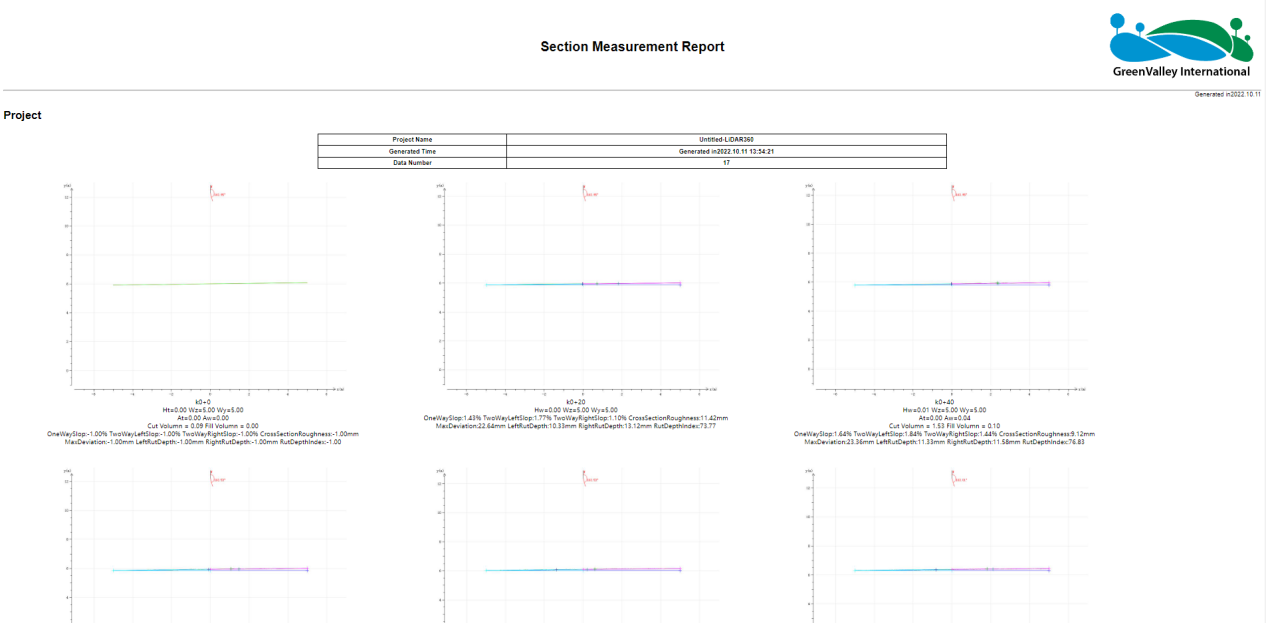
- 可计算多种道路断面参数,辅助进行道路施工等作业分析
软 件 详 细 功 能 升 级 列 表
– 新建工程
– 支持拖拽点云新建工程,且另存为到指定路径
– 支持一键打开LiFuser-BP和LiGeo的原始工程
– 支持如Trimble MX9,Leica Pegasus,Orbit Pos等格式的市面上90%以上移动测量设备的点云和全景数据进入软件
– 数据库
– 支持数据库进行矢量存储和管理
– 支持数据库中图层和表的增删改查
– 基础平台
– 新增点云与矢量投影转换功能
– 支持点云格式转换
– 支持点云选择裁切等基础工具
– 支持矢量数据格式转换
– 支持分类显示与编辑0-255类别
– 矢量编辑
– 移动功能新增右键菜单,支持指定距离、方向移动
– 新增任意多边形、圆选、球选、随机选择、立体选、圆柱体选择
– 新增多边形组合与拆分功能
– 新增一对多打断功能
– 符号库与标注标签
– 新增要素符号化功能
– 支持国内标准道路设施符号库
– 支持通用符号库
– 支持符号编号入库
– 支持对已采集点要素设置符号
– 支持符号的修改
– 新增注记功能
– 支持新增注记图层
– 支持独立对象添加注记
– 支持对象节点、边添加注记
– 支持3D、立面添加注记
– 支持注记风格修改
– 新增图层标签功能
– 支持所有图层属性进行标签显示
– 标签可配置样式
– 方便属性录入等操作
– 道路要素提取模块
– 新增带状地物模板化提取功能
– 新增单体化分割功能
– 新增单体化编辑功能
– 新增单体化参数提取功能
– 新增基于AI的道路表面标识识别功能
– 新增道路表面标识识别批处理功能
– 点云分类与提取
– 点云分类
– 支持点云深度学习分类
– 支持基于polygon的点云分类
– 支持基于矢量线的点云分类
– 支持空中噪点分类
– 支持低于地表分类
– 支持高于地面点分类
– 支持分离低点
– 支持孤立点分类
– 支持临近点分类
– 支持地面点分类
– 支持按属性分类
– 点云提取
– 支持按类别提取
– 支持按高程提取
– 支持按强度提取
– 支持按GPS时间提取
– 支持按回波次数提取
– 单目相机浏览量测
– 新增多个单目相机数据与点云叠加浏览显示
– 新增单目相机量测
– 新增单目相机外参标定
– 车载点云预处理
– 新增轨迹分段功能
– 新增激光器安置检校功能
– 新增轨迹质量自动检查与修复功能
– 新增控制点纠偏功能
– 新增车载航带拼接功能
– 道路分析模块
– 新增道路破损检测功能
– 新增净空分析功能
– 新增可视域分析功能
– 新增道路断面分析功能
– 新增道路横断面参数提取功能