
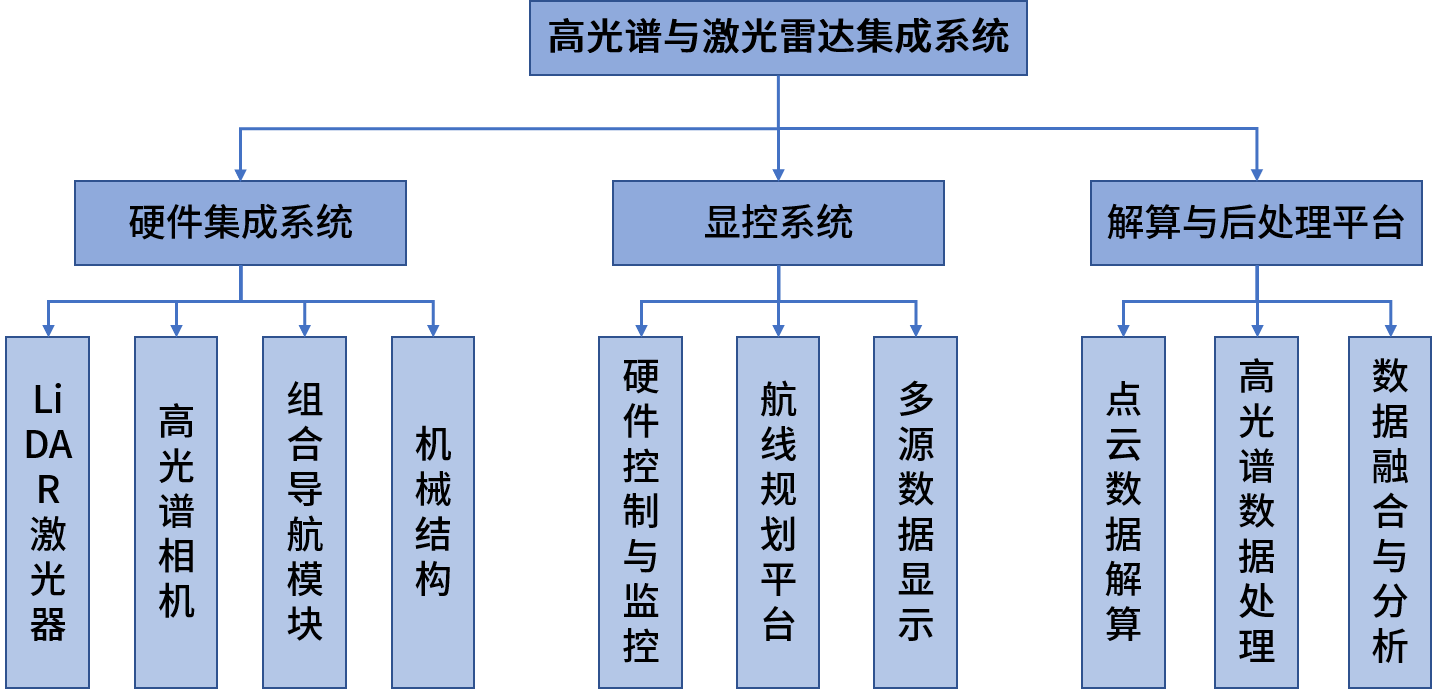
图1 高光谱与激光雷达系统组成
高光谱与激光雷达探测器主要是搭载在无人机或汽车平台上进行使用,其硬件部分主要集成了激光器、高光谱相机等高性能光学传感器,还有GNSS和惯导组成的位置和姿态定位系统,以及板卡、控制器等机械设备。显控系统主要是对数据采集过程中实现多源数据的实时显示和航线控制,保证数据采集过程的实时显示。解算与后处理平台是对点云数据和高光谱数据进行解算,并将两种数据进行融合,进行数据分析的平台。
为保证两种数据的精度相同,我们采用无人机搭载高光谱相机的方式进行高光谱数据采集,根据样地条件选择合适的无人机和高光谱相机;在同一无人机上,选择挂载数字绿土自研的激光雷达产品进行点云数据采集。
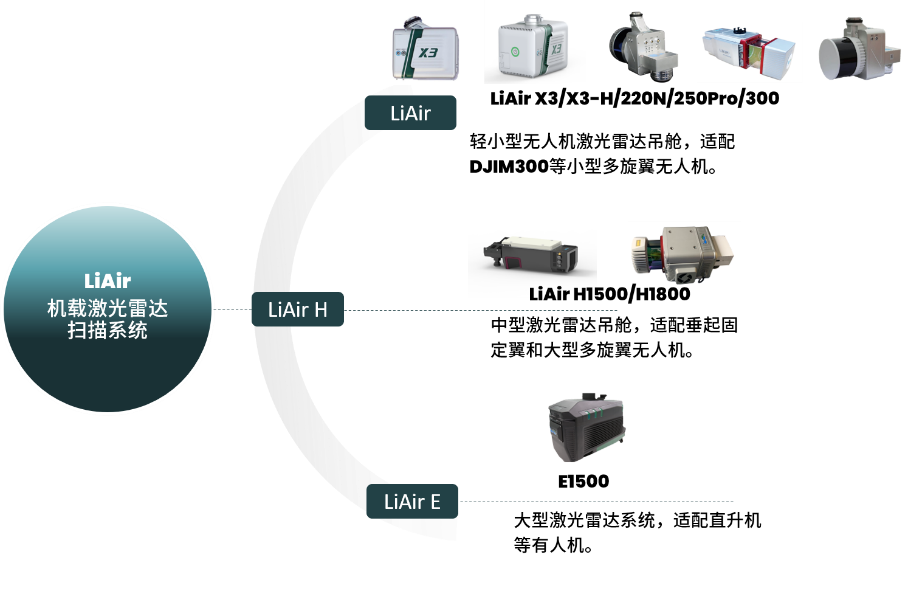
图2 数字绿土LiAir激光雷达产品
2、任务规划
无人机作业任务规划主要包括任务的总体计划、技术设计、航线设计和组织协调等宏观规划工作。为提高无人机数据采集的定位精度,可以在无人机飞行前在区域内布设像控点。像控点的布设要均匀,且有足够的可识别性。
 图3 像控点示例
图3 像控点示例
 图4 像控点分布示例
图4 像控点分布示例
在前期工作完成之后,就可以进行数据采集。数据采集要覆盖整个测区,且要在天气晴朗、低空无云或者云量较少的情况下进行。
对于范围较大、多架次采集的高光谱和点云数据分别进行数据拼接,拼接完成后的高光谱数据为TIFF格式,点云数据为LiData格式。

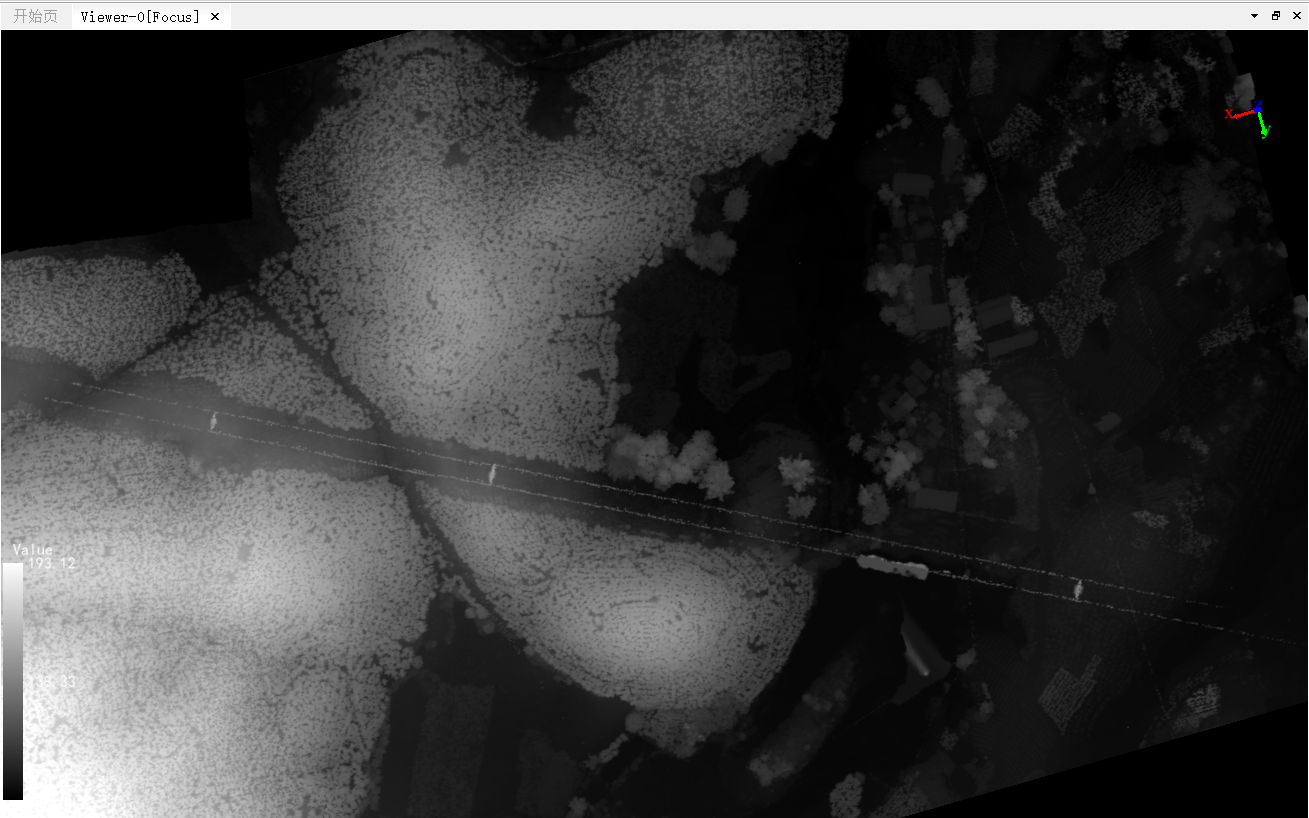 图5 同步采集的激光点云数据(上)和高光谱影像数据(下)
图5 同步采集的激光点云数据(上)和高光谱影像数据(下)
2、数据配准及分析
数字绿土自主研发的LiDAR360软件支持点云数据和栅格数据同时导入。将采集好的数据同时导入到软件后,进行数据配准。
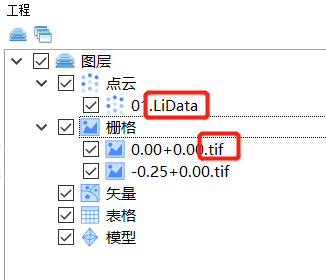
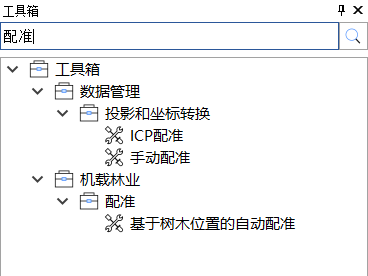
图6 LiDAR360软件数据显示和配准工具
数据配准好之后,可以在软件中利用“卷帘”工具对其配准质量进行检核。
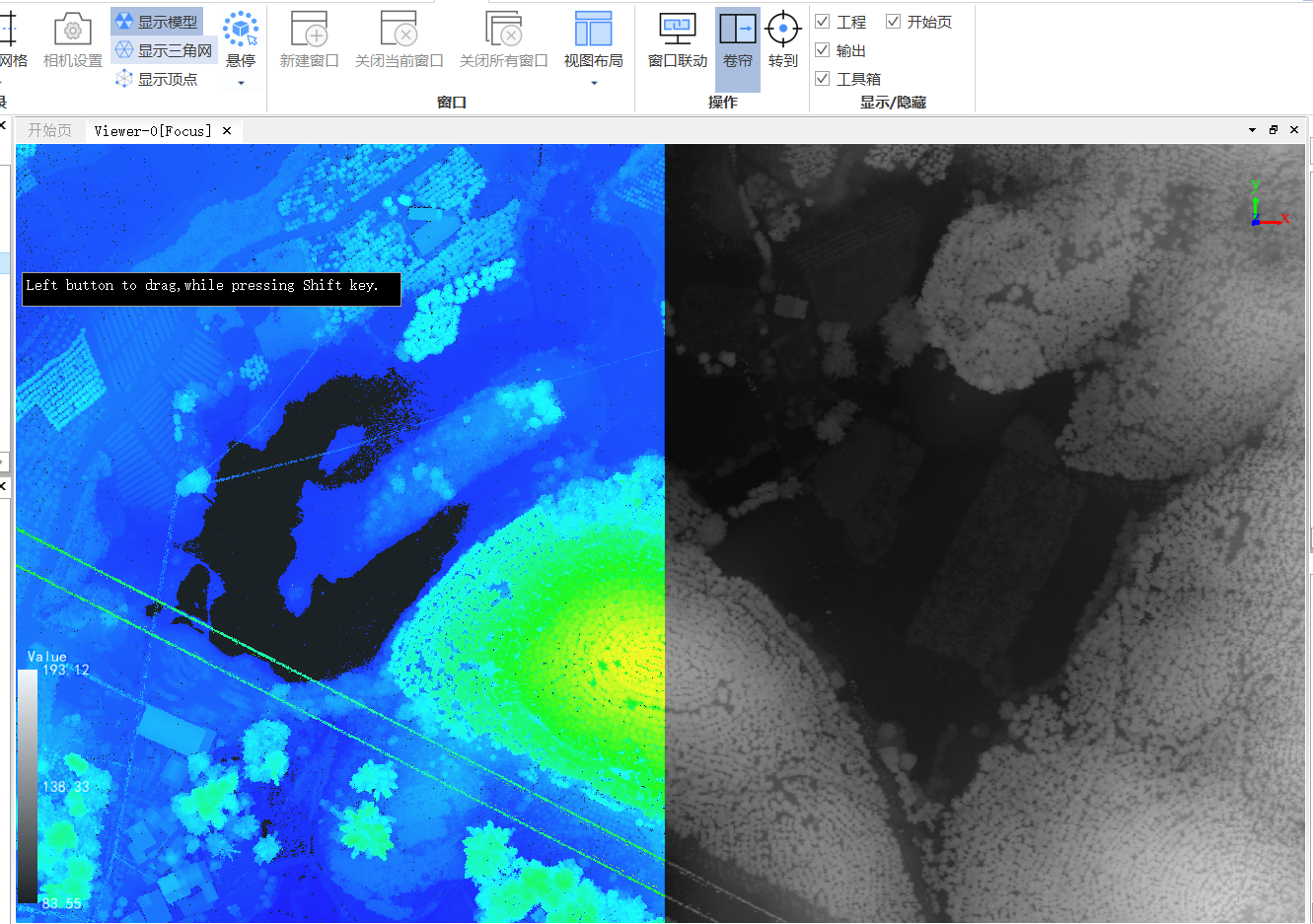 图7 LiDAR360中核验点云和影像的配准情况
图7 LiDAR360中核验点云和影像的配准情况
1、植被监测
高光谱可以获取植被冠层表面的光谱信息,通过波谱分析可以反演多种植被指数,如NDVI、RVI、GVI、DVI等,同时激光雷达具有较强的穿透性,可以透过植被冠层,获取植被的高度、胸径等信息。两种数据融合,在植被监测方面具有很好的优势。
2、土地覆盖类型分类
使用遥感手段进行土地覆盖类型分类,是城市发展、土地管理等领域的重要方法。但是使用单纯的被动遥感影像进行土地分类,对于地形起伏较大、建筑物分布密集的区域,分类结果误差较大。高光谱与激光雷达集成的监测系统在获取地表光谱信息的同时可以获取地表物体的高度信息,既能够提高地物分类的精度,同时又能精确提取相关的属性参数,例如覆盖面积,实体高度、地形等。
文章参考文献:
[1] 燕正亮,张洁,王晓龙,徐瑞,许杰.多光谱激光雷达系统研究与实践[J].测绘技术装备,2020,22(01):17-20. [2] 龚威,史硕,陈博文,宋沙磊,吴德成,刘东,刘正军,廖梅松.机载高光谱激光雷达成像技术发展与应用[J].光学学报,2022,42(12):29-40.