首页
产品
硬件产品
LiAir 无人机激光雷达扫描系统
LiGrip 手持旋转激光扫描仪
LiMobile 车载移动激光扫描系统
LiBackpack 背包激光雷达扫描系统
LiCrop 表型数据采集系统
软件产品
LiDAR360激光雷达点云数据处理分析软件
LiDAR360 MLS 三维要素智能提取与分析软件
LiPowerline 激光雷达电力巡线软件
LiPlant 表型数据处理软件
LiCloud三维数据服务一站式软件
服务与售后
云服务
在线报价
售后支持
贴吧
绿土小课堂
解决方案
电力巡检
智慧农林
地形测绘
高精地图
勘灾应急
数字城市
新闻中心
公司动态
产品动态
市场活动
国际动态
关于我们
公司介绍
荣誉资质
合作伙伴
代理商
招贤纳士
自主过交跨挑战?LiAir X4 :让电力巡检更省心,安全再升级
自主过交跨是数字绿土LiAir X4自主飞行激光雷达采集系统的一项核心亮点,旨在提升无人机在输配电线路巡检过程中全自主避障能力。基于LiAirX4旋转式激光雷达的全向扫描能力获取高分辨率实时三维点云,该功能可识别、分析并跨越交跨线路,安全可靠地进行电力线路巡检工作。
▲自主过交跨示意图
为什么要自主过交跨
在进行输配电线路巡检时,无人机需要与电力线保持一定的安全距离以确保飞行安全。然而,在某些线路上空,可能会遇到与飞行轨迹处于同一高度的交跨线,需要无人机跨越后才能继续其巡检任务。
不同于山体、植被、建筑等面状障碍物,由于电力线相对细小,传统的基于视觉图像、超声波雷达或者毫米波雷达的无人机自动避障系统都存在一定的缺陷(视觉容易受光照或者背景干扰,超声波传感器测距短,毫米波雷达分辨率低等),会导致无人机难以准确的识别到电力线,无法做到及时有效的避障悬停,增加了无人机撞线的风险。
同时,由于无人机的FPV飞行相机分辨率低,当无人机与交跨线相隔较远距离或者逆光环境下,工作人员仅凭肉眼也难以从无人机实时回传视频中直接观测到交跨线的具体位置,无法及时对无人机进行必要的操作调整。
▲交跨线
以往,针对这种情况,需要工作人员提前了解交跨线的具体位置、高度以及跨越距离等关键信息,以便在无人机飞行至相关区域时能够提前做出反应。在实际操作中,工作人员会先将无人机悬停在一个相对安全的距离,然后手动操控无人机跨越交跨线路后,才能继续执行后续的巡检工作。
▲手动悬停
自主过交跨方法
面对交跨线这一挑战,数字绿土LiAir X4自主飞行激光雷达采集系统能够在无需人工干预的情况下,自主识别并安全穿越交跨区域。
智能识别
LiAir X4配备了先进的旋转激光器和高精度惯导系统,能够实现360°x270° 全向点云扫描,精准识别飞行线路上障碍物。通过对通道环境的全面感知,可准确判断交跨线的位置、高度以及周围复杂环境中的潜在障碍。
▲点云全向扫描
自主决策
在识别到交跨线后,LiAir X4会利用其强大AirPilot自主飞行算法,自动判断安全飞行间距,自主拉升无人机的飞行高度或绕行避障,无需人工干预。
▲自主拉升
多场景适用
LiAir X4可针对不同电压等级、不同走向的交跨线路,实现单次或者连续跨越交跨线路。
▲连续过交跨
自主过交跨优势
安全升级
传统过交跨时,需要工作人员具备高超的飞行技巧和对复杂环境的快速反应能力,LiAir X4减少了对操作人员技能的依赖,也就意味着降低了因人为操作失误可能导致事故的风险,增强了作业的安全性。
解放人力
通过自主过交跨功能,工作人员可以将更多的精力投入到数据分析和决策制定中,如通过实时查看通道树障危险点,及时评估风险并采取应对措施,而不是飞行操作本身,实现了从“体力型”向“智力型”巡检模式的转变,进一步提升了巡检工作的专业性和精准度。
▲树障危险点实时查看分析
自主过交跨流程
自主过交跨主要包含交跨识别、靠近交跨、飞行跨越、确认完成等几个阶段组成。
交跨识别
利用深度学习模型对实时三维点云进行分类,然后对电力线点进行线路拟合提取交跨线路,为了安全以及信息完整性,整个过交跨过程中会持续进行交跨识别。
靠近交跨
a. 当无人机接近交跨线时,系统会提示用户准备执行过交跨操作。
b. 当无人机与交跨线达到一定距离时,无人机将自动停止向前飞行,并开始执行拉升操作。
飞行跨越
a. 按照规定步长规划飞机拉升航迹,直到无人机到达交跨线路最高线上方一定安全距离,开始横跨飞行。
b. 按照规定步长规划无人机横跨航迹,直到无人机到达交跨线路最远线前方一定安全距离,开始下降飞行。
c. 按照规定步长规划无人机下降航迹,直到无人机到达执行过交跨前的飞行高度。
确认完成
a. 无人机下降完成后,提示用户过交跨过程完成。
b. 启动仿线,重新找到跟踪线路,开始自主仿线飞行。
▲自主过交跨流程
在新一轮科技革命和产业变革中,LiAir X4解决了传统无人面临交跨线路时难以准确识别且需要依赖人工手动悬停过交跨的难题,提升了无人机的飞行作业安全。未来,数字绿土持续提供更前沿的巡检方案,用科技力量为电力系统的稳定运行提供坚实保障。
收藏
菜单
 ▲自主过交跨示意图
▲自主过交跨示意图 ▲交跨线
▲交跨线 ▲手动悬停
▲手动悬停 ▲点云全向扫描
▲点云全向扫描 ▲自主拉升
▲自主拉升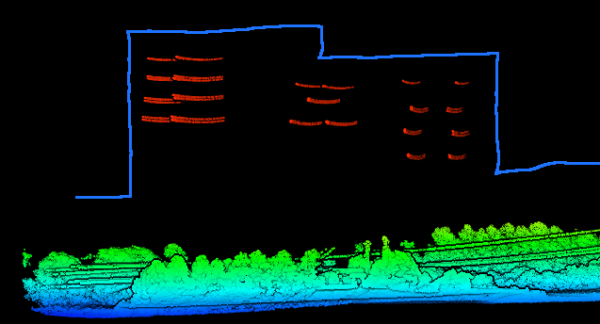 ▲连续过交跨
▲连续过交跨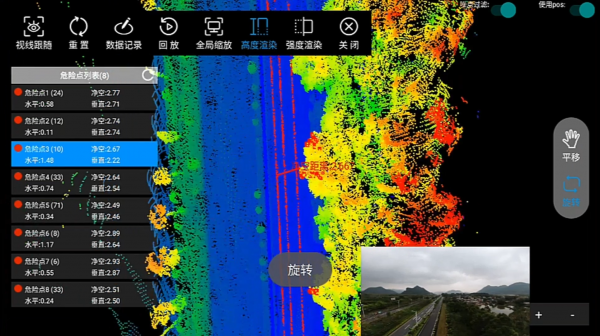 ▲树障危险点实时查看分析
▲树障危险点实时查看分析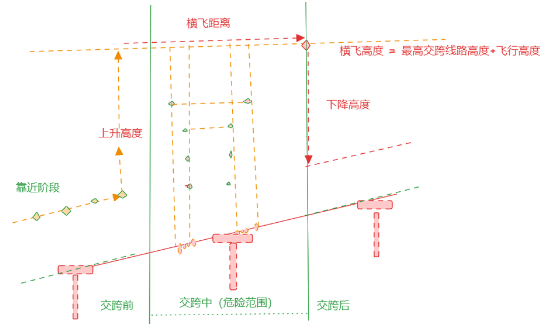 ▲自主过交跨流程
▲自主过交跨流程 ▲自主过交跨示意图▲交跨线▲手动悬停▲点云全向扫描▲自主拉升▲连续过交跨▲树障危险点实时查看分析▲自主过交跨流程
▲自主过交跨示意图▲交跨线▲手动悬停▲点云全向扫描▲自主拉升▲连续过交跨▲树障危险点实时查看分析▲自主过交跨流程