
城镇几乎是所有国家经济发展的重要承载体,无论是中央城市工作会议精神,还是动辄两位数增长的房价和多发的交通拥堵,都凸显了城市规划的重要性。
城镇规划中的控制性详细规划和专项规划,都需要1:500~1:5000大比例尺地形图,由于城镇建设日新月异,这样尺度的地图必须采用近期测绘的成果才有意义。传统的城镇测绘手段经常逼着测绘工作者置身于茫茫的车流人流之中(阻碍中国互联速度的后厂村路和通往西郊机场的紫竹院路上我都见过,是北京测绘院的小伙伴吗),安全?效率?说起来都是泪啊。
今天,LiDAR360给大家介绍一个新方法的城镇测绘案例,希望对大家有所帮助。
台前故事
2016年8月19日,一辆厢式货车停在湖南中南部某市的一片城区,这里海拔56-73米,低矮民房多,少量高楼,部分农田,约三分之一被植被覆盖。
上午9:15分,有3个人从车上放下一架小飞机,飞机下腹部抱着一个银色白盒子。

9:37分,飞机升空,10:02分,飞机又在起飞地点降落。
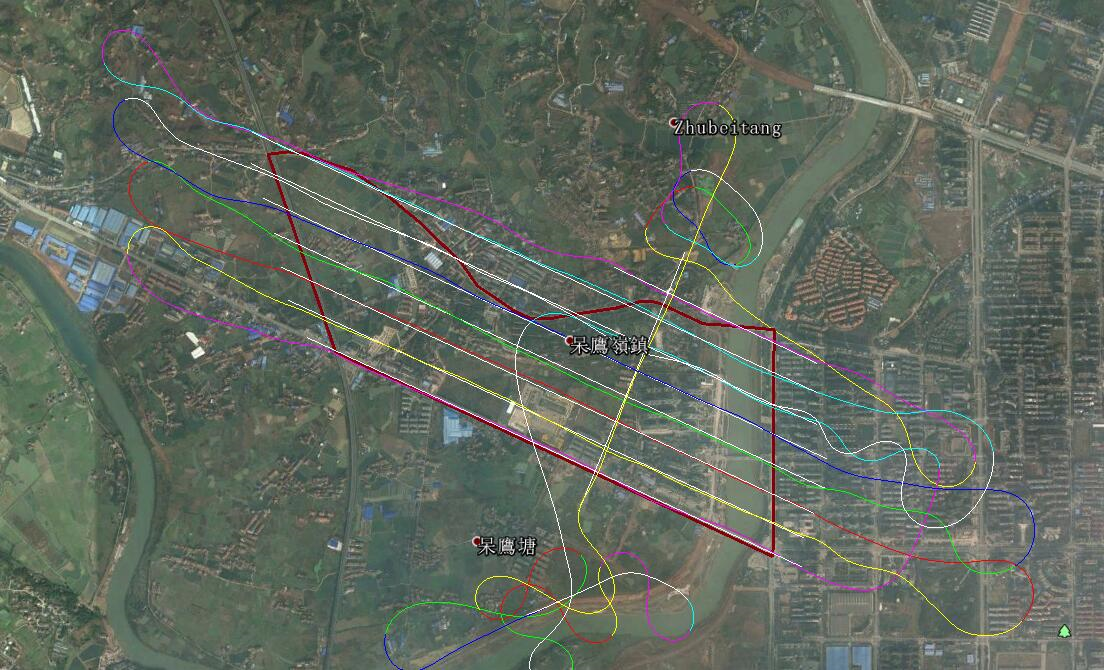
10:07分,连接到白盒子上的电脑地图上画出很多线,布满了附近4平方公里范围。
10:28分,电脑屏幕上又出现了一幅立体效果的地图,道路、房屋、植被、电线杆等等地物看起来非常直观,工作人员说这是激光点云。
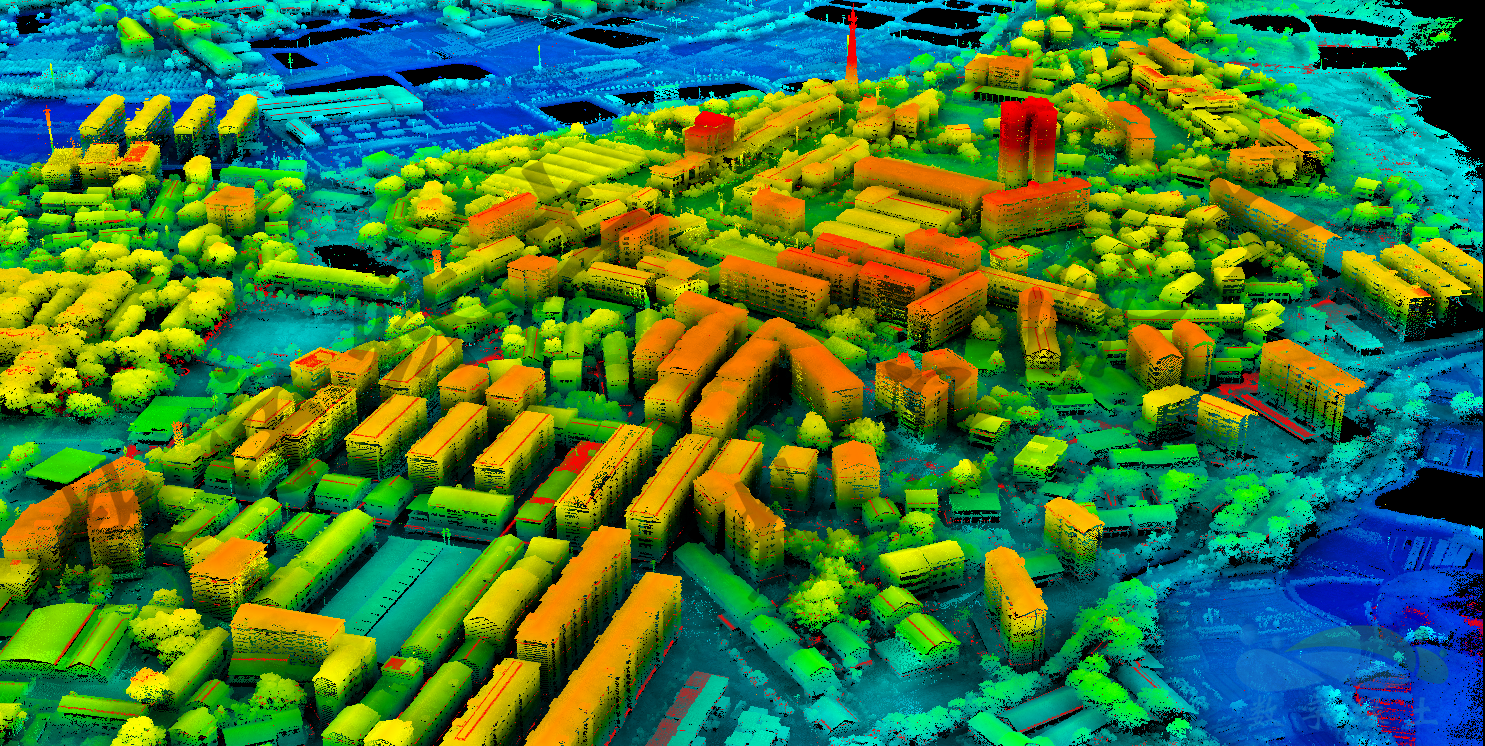
初步解算的激光点云数据
10:36分,电脑屏幕上又出现了一批照片。

10:40分,这几个工作人员开始装车,11:56分,那辆厢式货车扬长而去。
8月26日上午10点,省国土厅某会议室,前些天用电脑连接飞机白盒子的那个人又坐在电脑前,会议室投影仪屏幕上出现了如下画面。

1:500 DOM数据成果
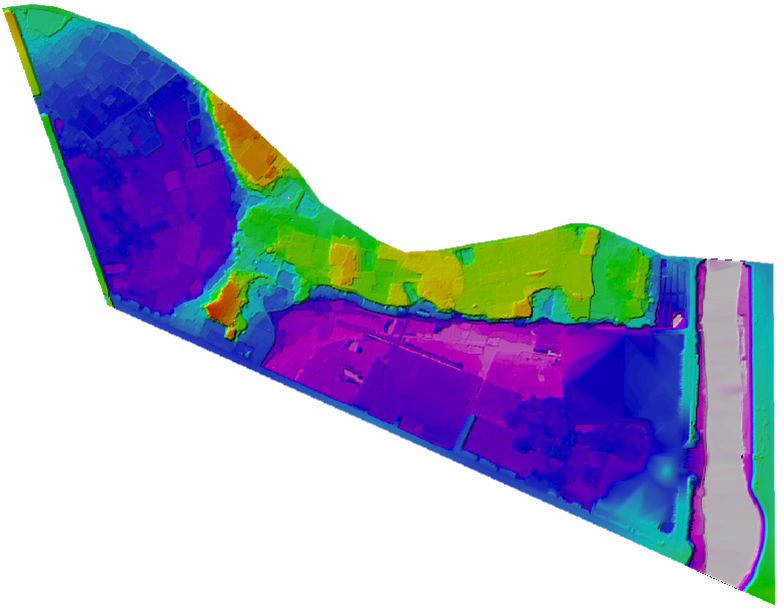
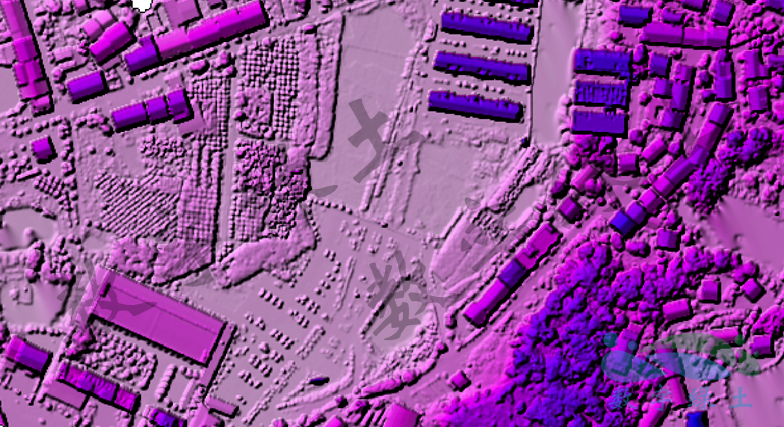
1:500 DEM数据成果
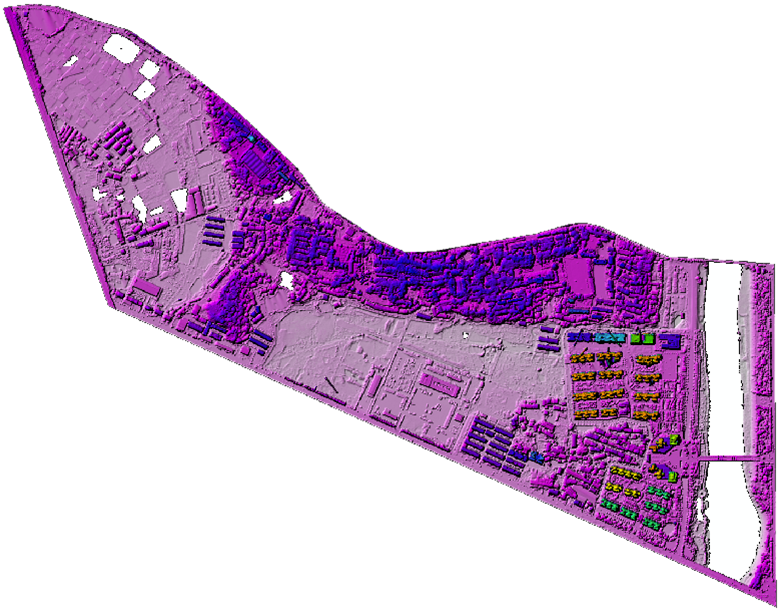
1:500 DSM数据成果

1:500 DLG数据成果
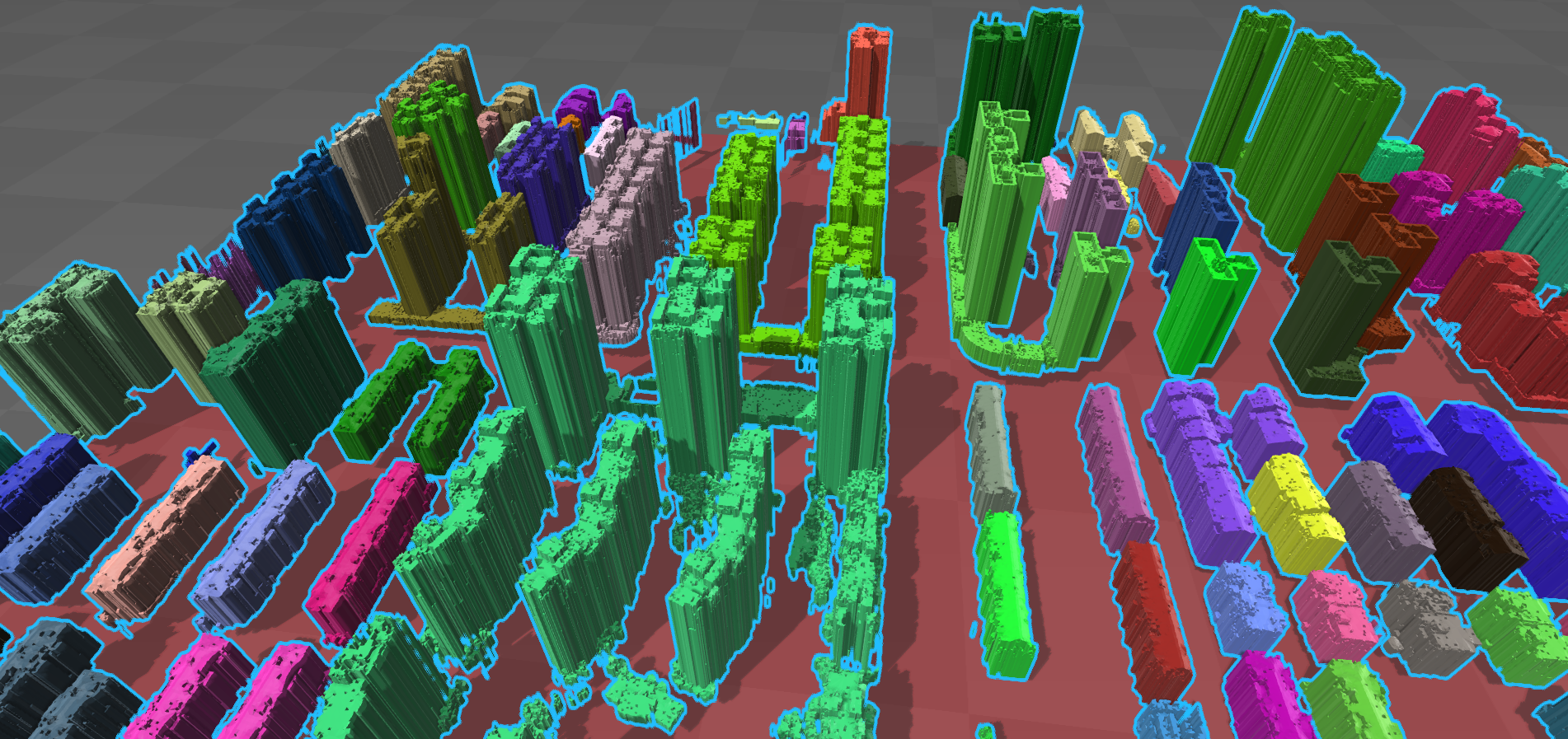
激光点云全自动建模单体建筑模型成果
10:50,会议室响起热烈掌声。
幕后工作
早在8月17日,就完成了项目技术设计,定义了数据处理流程。

激光点云数据预处理流程
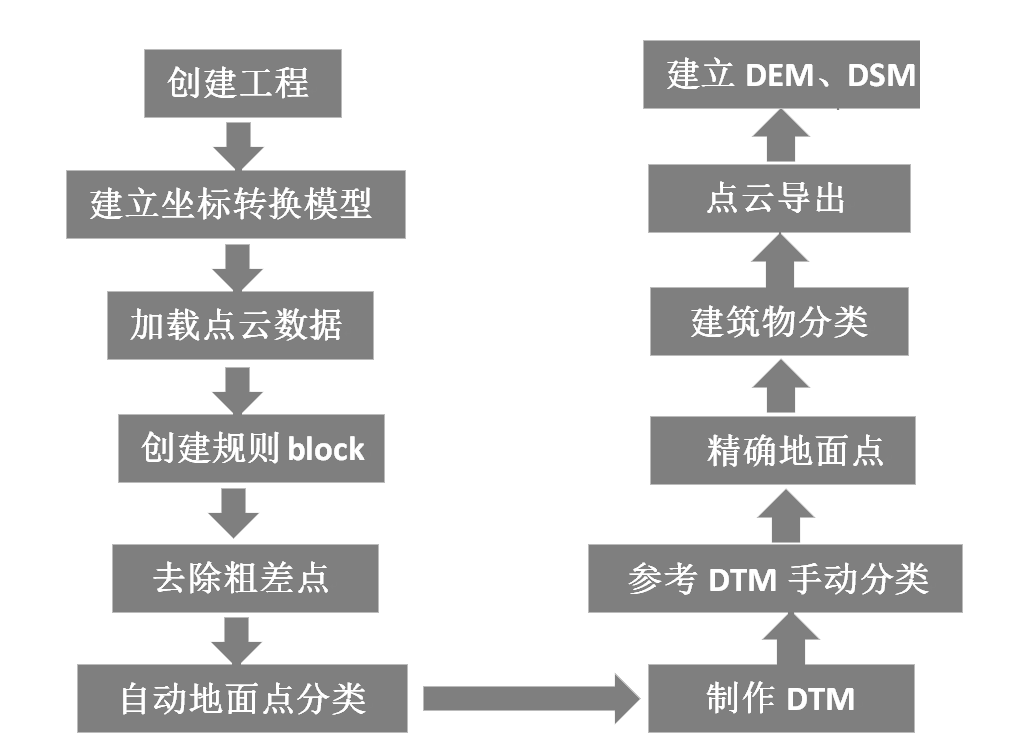
激光点云数据后处理流程
8月19日,工作人员现场组装了LiEagle2000。

LiEagle同时集成了激光雷达和影像两种载荷,轻盈便捷,不需要专人操作,设备本身有极大的成本优势(相当于传统机载激光雷达设备的20%-40%),而且轻型飞行器的航飞成本和难度也大幅降低,可选择的空间更是大幅扩展,各种型号的直升机、轻型固定翼飞机、动力三角翼,甚至飞艇,都是合适的平台。
8月20日,工作人员用LiDAR360软件,对原始点云数据进行预处理,得到了更精准的激光点云数据、DEM、DSM、DLG。
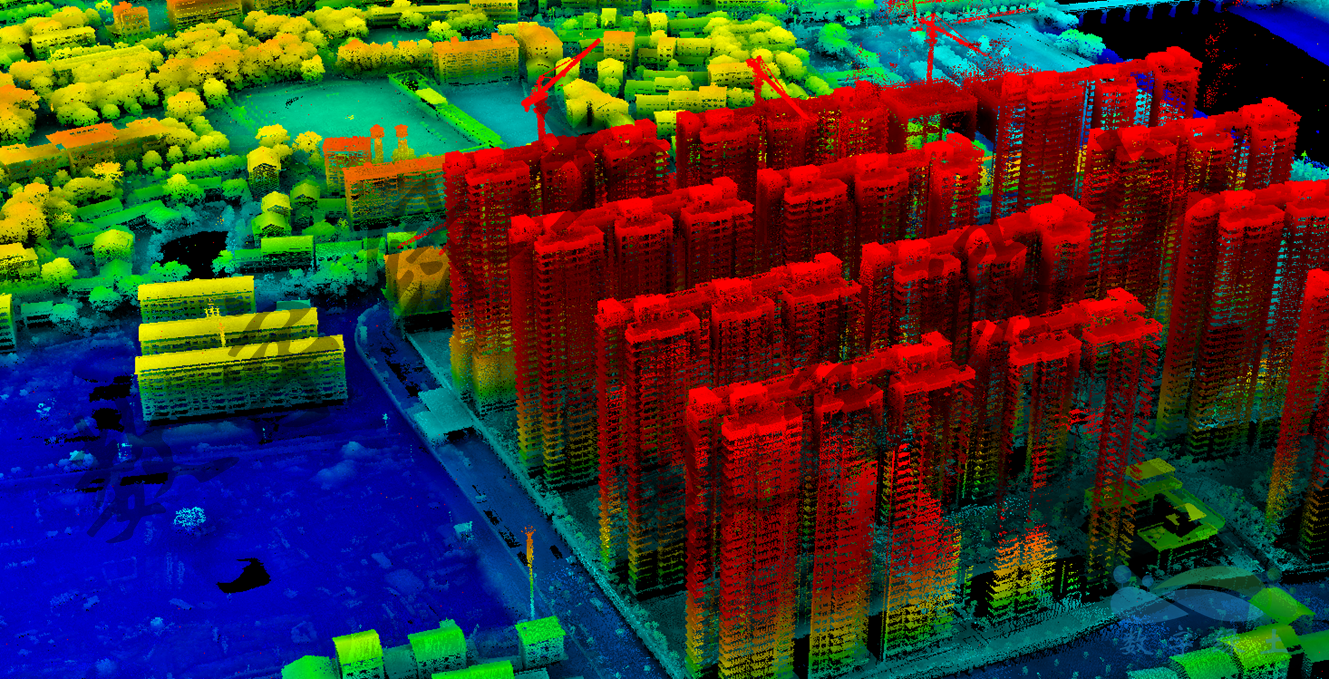
精校准的三维激光点云数据
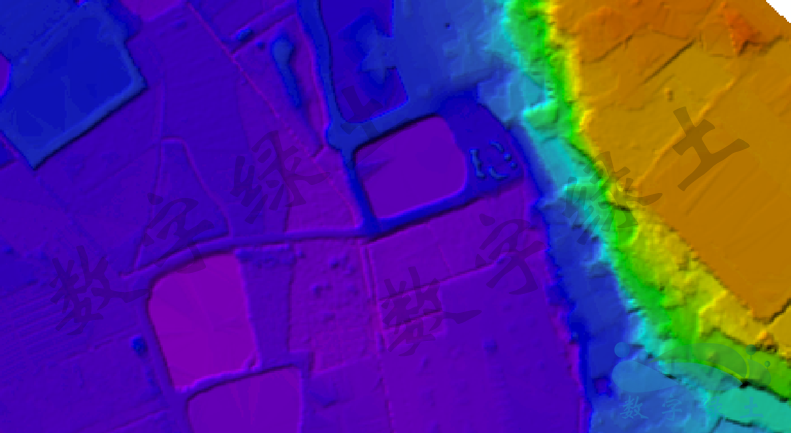
精细DEM
精细DSM
同时,另一组工作人员则利用LiMapper开始生产DOM。经过“无人机航摄原始数据→影像预处理→高精度相机标定→空中三角测量→DSM/DEM自动提取→影像正射纠正→影像辐射纠正→编辑拼接线→按照图幅输出DOM”一系列处理。精美的正射影像图便呈现眼前。

精细DOM
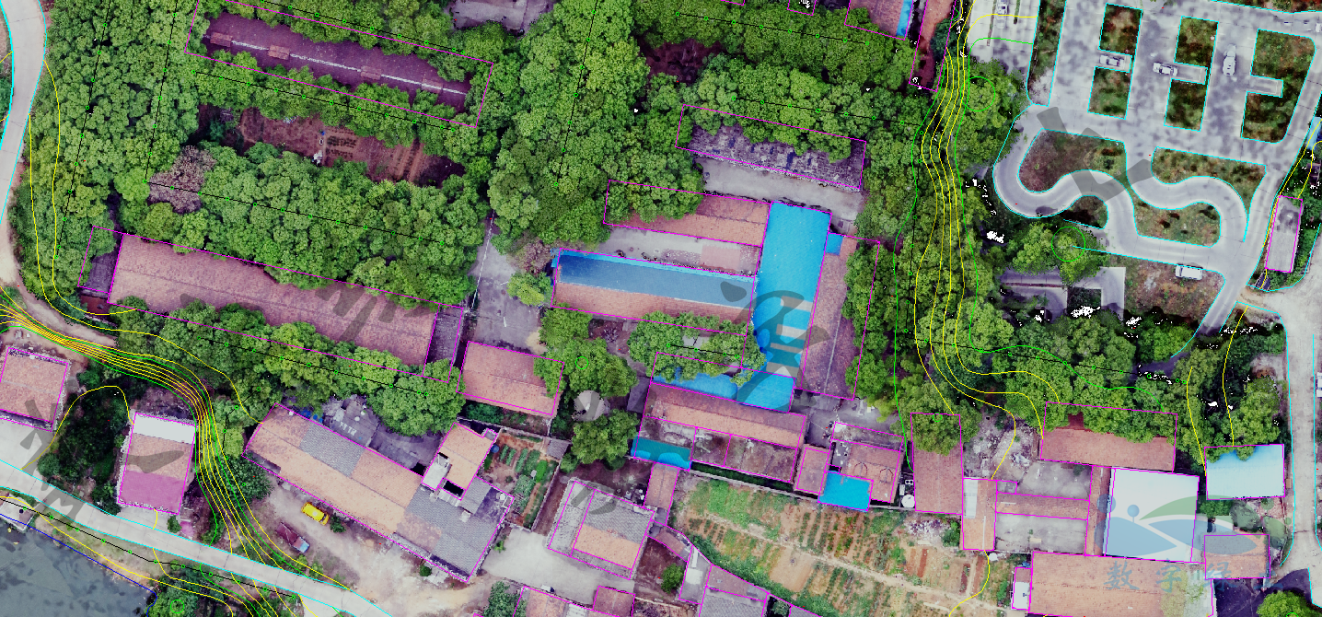
DOM与DLG套合
看到线划压盖了树木,您可千万别奇怪,那正是激光雷达穿透植被后,准确测得的道路边界线,单靠相机拍摄的影像数据是不能实现的。
再回到台前
汇报人说,经测算,单位面积的上述成果比传统手段至少节省30%成本,生产效率提高8倍。而且,这种精细度的DEM、DSM,传统手段和航测几乎做不到。何况,成果都是高精度三维数据,还可以在城市运行各领域(智慧城市、不动产、园林绿化等)衍生出多种增值数据产品。