一、概述
树线矛盾一直以来都是电力部门巡检关注的重点对象,当树与线的安全距离不足时,很容易引发跳闸、放电等事故。而树障处理的两大难点,一是树木到导线距离的估算,二是树障砍伐的赔偿问题。前者可以通过技术手段来实现,后者则需要各方配合。
估算树木到导线的距离,传统的作业方式有人工目测并心算弧垂到树顶距离,这需要班组成员从多种角度观察,由人的观察角度和错觉引起的误差难以避免。如果要较准确计算导线弧垂与树木之间的距离,避免乱砍乱伐,破坏植被,则需要携带专业测高杆、经纬仪等笨重仪器,线路巡护人员因此工作负担巨大。激光雷达无人机作业已成为电力巡线新手段。
随着激光雷达技术的发展,无人机激光雷达系统作业逐渐成为电力巡线的新手段。以LiAir 无人机激光雷达扫描系统为例进行阐述,以整体作业流程,包含外业数据采集,内业的数据处理、到安全距离快速检测报告生成来具体说明。
二、设备简介
电力走廊数据采集设备—LiAir 无人机激光雷达扫描系统
LiAir 无人机激光雷达扫描系统是一款的轻型激光雷达点云数据采集系统 ,一体化集成集激光雷达扫描仪、GNSS 和 IMU 定位定姿系统及存储控制单元,可实时、 动态、海量采集高精度点云数据及丰富的影像信息,通过配套的LiAcquire 机载激光雷达地面站软件,快速获取电力走廊数据。

| LiAir 200 标准版 | ||
| 重要参数 | 绝对精度 | ±12cm |
| 重量 | 4.35kg | |
| 扫描范围 | 0.3-200m | |
| 相机(可选配) | 2400万像素 | |
| 激光雷达单元 | 安全等级 | 1级 |
| 测量范围 | 200m(20%反射率) | |
| 测距精度 | ±2cm | |
| 最大有效测量速率 | 700,000Pts/sec | |
| 搭载平台 | DJI M600 | |
| 起飞重量 | 15.5kg | |
| 作业时间 | 4.4kg载荷:18min | |
| 最大风抗性 | 8m/s | |
| 巡航半径 | 2Km | |
| 惯导系统 | 姿态精度(后处理) | 0.1°(1σ) |
| 方位角精度(后处理) | 0.1°(1σ) | |
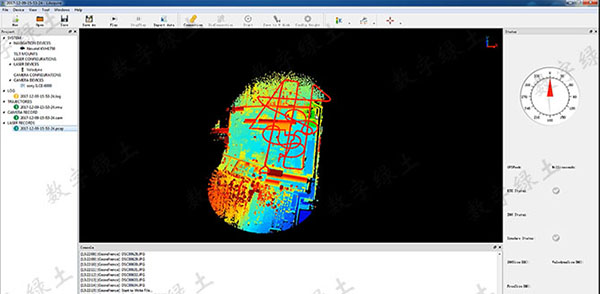
LiAcquire 机载激光雷达地面站软件,用于设备的控制和实时监测。
- 开启和关闭扫描仪、相机、惯导
- 实时显示设备状态、行进轨迹、扫描点云
- 支持航带裁切,真彩色点云解算,点云量测,数据回放
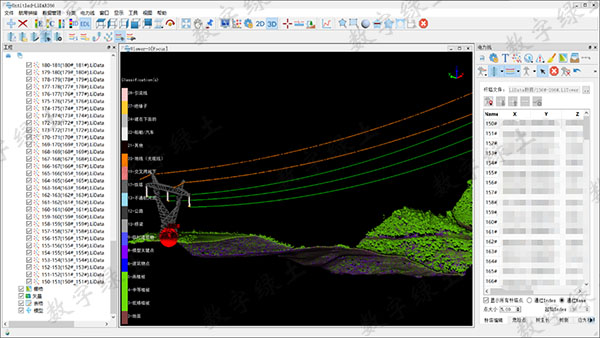
电力走廊点云数据处理分析— LiPowerline激光雷达电力巡线软件
LiPowerline激光雷达电力巡线软件,通过海量点云数据的处理分析,快速精准提取电力通道内的危险目标信息,并为综合模拟工况下的电力安全运行提供分析预测。
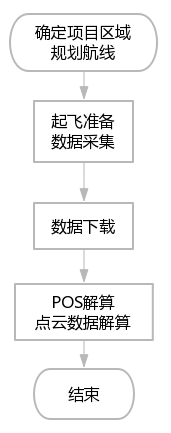
三、作业流程
外业数据采集过程
- 航线设计采
- 集过程实时监测
- 数据预处理,点云数据解算(POS数据的处理)
注意事项
- 基站摆放位置:位置开阔、无信号干扰,多条航带基站位置固定
- 飞行前检查:设备状况、起降场地状况
- 飞行作业中注意:线路情况,排除人员及其他信号干扰,航速、航高等飞行参数
- 环境及气象条件
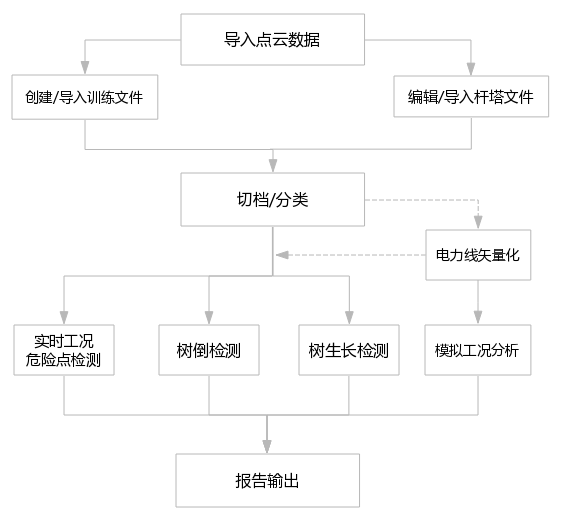
数据处理分析过程
- 导入点云数据,批量化预处理
- 检测参数设置,杆塔坐标及属性编辑
- 数据切档,点云分类
- 绝缘子编辑,杆塔/电力线矢量化
- 实时工况 / 模拟工况分析,报告生成
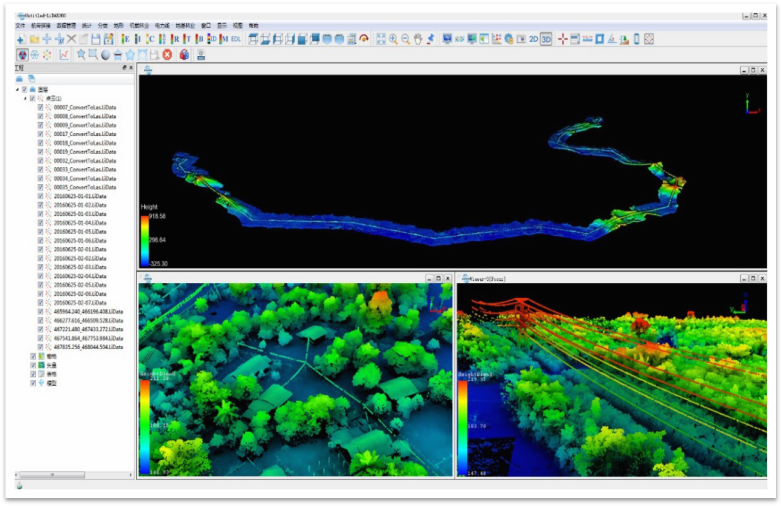
(一)导入点云数据
将获取到的数据无抽稀加载到LiPowerline软件,进行数据的处理分析。
大数据量承载能力,单次加载量超过1000基杆塔(220kV),推荐单次作业量为100-150基杆塔。
TB 级点云数据可视化编辑
- 支持不抽稀加载> 1000 基杆塔原始数据
- 多种点云显示模式,地物类别清晰
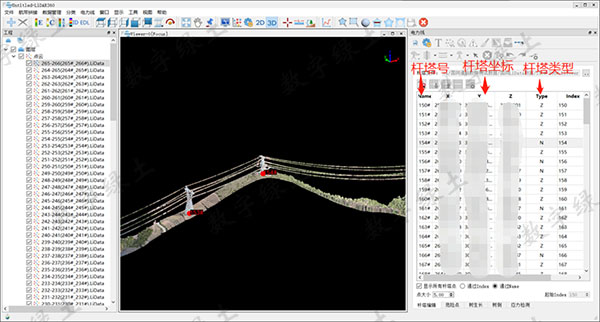
(二)杆塔编辑
- 根据KML文件生成塔文件
- 导入杆塔坐标表格文件(表格或txt文件)
- 输入起始杆塔号,手动点选杆塔位置、输入杆塔类型,生成塔文件
(三)切档/分类
- 手动分类/创建分类训练模型
- 自动切档/分类
- 分类完成后按类别显示
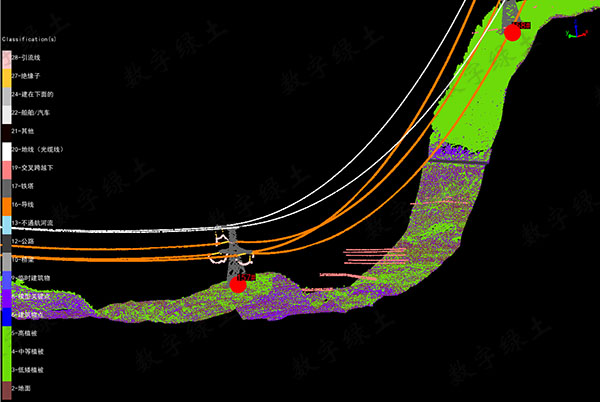
按类别显示
(四)矢量化
![]()
1.绝缘子编辑
2.电力线矢量化
- 单根拟合电力线
- 批量拟合电力线
3.杆塔矢量化
- 五点创建杆塔
- 创建 / 删除杆塔臂
可基于实时工况矢量数据完成实施工况安全距离检测、树倒 / 树生长分析
可基于模拟工况矢量数据进行上述分析检测,以及与实施工况对比
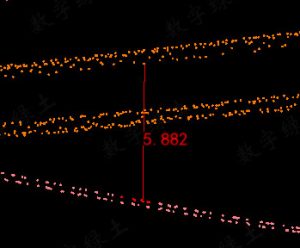
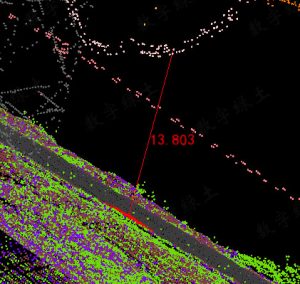
(五)实时工况危险点检测
- 根据对应安全等级阈值范围,确定其危险等级,并配置为.xml文件
- 根据地物点(非电力线和电力塔类别点)与电力线点的最近空间判断是否存在危险性
交跨危险点 引流线危险点
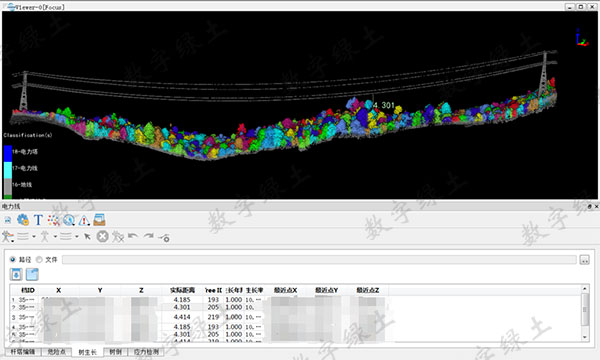
(六)树生长分析
设置树生长参数,根据危险点检测参数(.xml),判断树木生长情况下的净空距离,分析可能出现的净空危险点。
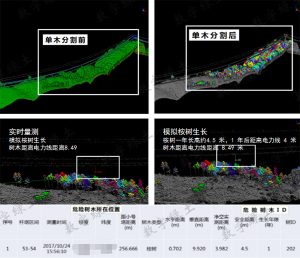
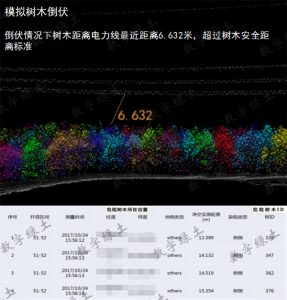
(七)树倒分析
设置单木分割参数,根据危险点检测参数(.xml),判断树木倒伏情况下的净空距离,分析可能出现的净空危险点。
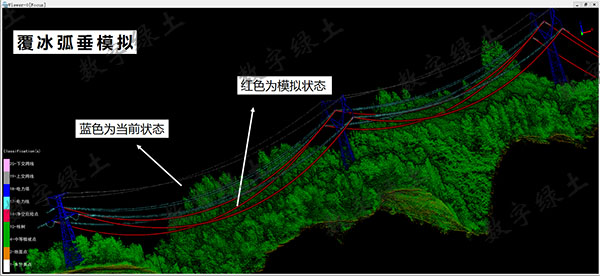
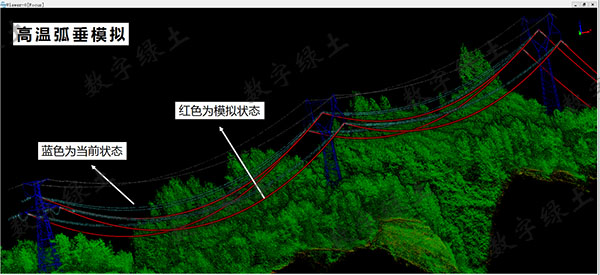
(八)模拟工况分析
设置实时工况参数(导线温度、覆冰厚度、风速)以及模拟工况参数,分析模拟工况下的净空距离。

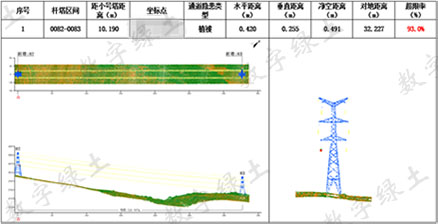
(九)报告生成
- 安全距离快速检测报告
- 实时工况安全距离检测报告
- 实时工况交叉跨越检测报告
- 树木倒伏安全距离检测报告