
一、概述
胸径是表达树木生长状况的重要的因子之一。传统方式以胸径尺、轮尺等接触式测量为主,外业工作量较大;使用地基激光雷达采集林业数据,须进行布设标靶、架站、扫描、移站等操作,完成整体数据采集需要花费一定的人力及时间,采集完的数据也需要进行多站拼接后才能输出最终的采集结果。
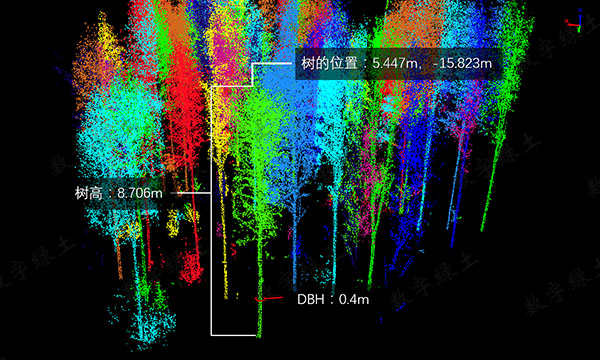
本文介绍采用基于移动平台应用激光雷达技术,采取自下而上的扫描方式,获取树干/枝叶详细的结构信息,并对使用激光雷达数据软件进行单木进行识别,获取树木位置、株数、树高、胸径和枝下高等信息。
二、设备选用
地面移动激光雷达扫描系统--LiBackpack 50 背包激光雷达扫描系统
LiBackpack背包式室内外一体化激光雷达扫描系统,结合激光雷达和同步定位与地图构建(SLAM)技术,无需GPS即可实时获取周围环境的高精度三维点云数据。

| 系统参数 | |||
| 尺寸(mm) | 986 X 270 X 147 | 电池 | 5700mAh |
| 重量 | 5.6kg | 工作时间 | ~2.5h(一块电池) |
| 功率 | 60W | 端口 | HDMI,USB,网口 |
| 电压 | 22.8V | 存储 | 512G SSD |
| 电流 | 1.9A | 适用环境 | 室内和室外 |
| 控制及显示 | 网络控制和显示(手机、平板电脑);有线数据传输(平板电脑) | ||
| 传感器参数 | |||
| LiDAR 传感器 | VLP16 | ||
| LiDAR精度 | ±3cm | ||
| 垂直视场角 | -15°~15° | ||
| 测量范围 | 100m | ||
| 数据成果 | |||
| 数据精度 | ~ 5cm | ||
| 点云格式 | las,ply | ||
- 数据处理软件——LiDAR360点云数据处理分析软件易操作:自动化程度高,开机即用
- 低成本:无需GPS,成本大幅度降低
- 高精度:结合激光雷达和SLAM算法实现室内外一体化测量,无需GNSS信号即可实现厘米级数据精度
- 查看简洁方便:数据在手机、平板等移动端实时显示;支持无线/有线方式查看数据;数据传输稳定性强,边采集边查看
- 高效率:实时显示高精度点云数据、支持在线闭环以及闭环优化,扫描完成即可导出采集点云数据和运动轨迹
- 设计轻巧便捷,可搭载不同的移动平台,无论是手持、步行、骑行、车载都可以轻松采集数据
LiDAR360在通用平台上扩展了地基林业模块,用于地基或者背包激光雷达点云数据处理分析。主要功能包括:地面点分类、批量胸径提取、单木分割、单木参数提取。
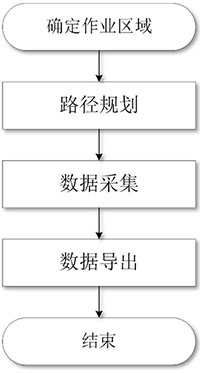
三、作业流程
数据采集流程如下:
以30m*30m 林业树木样方为例:
1、对采集样区进行路径规划,路线规划目的是可以采集到树木的所有信息,同时减少数据冗余,针对30m*30m的样区,如果树木比较密集,采用下图左所示的路径规划,若树木比较稀疏,则可采用下图右所示的路径规划:
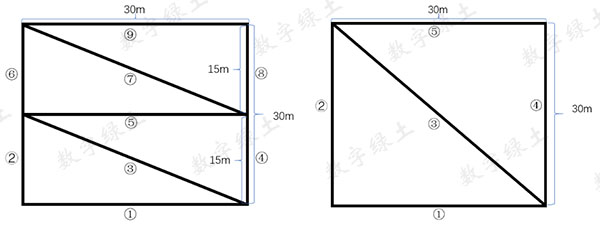
图1 路径规划(树木密集:左 树木稀疏:右)
(注意:本案例中的路径规划只是参考,由于实际作业环境不同,可以做适当修改,但路径整体规划还是最好保持一致。)
2、路径规划完成后,背负LiBackpack进行数据采集:
- 移动端设备连接LiBackpack电脑热点;
- 在设备上点击start按钮开始数据采集,按照设定的路径规划进行数据采集作业;
- 行至终点后,点击stop按钮结束采集,插上U盘,点击copy按钮,将采集结果导出。
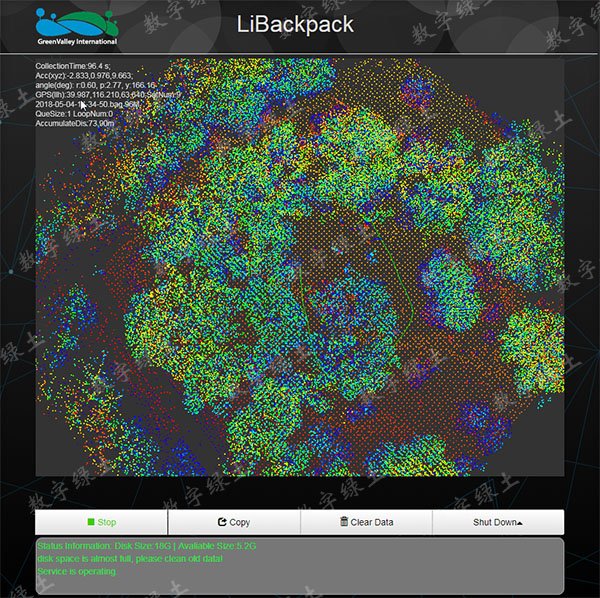
采集数据在手机端实时显示
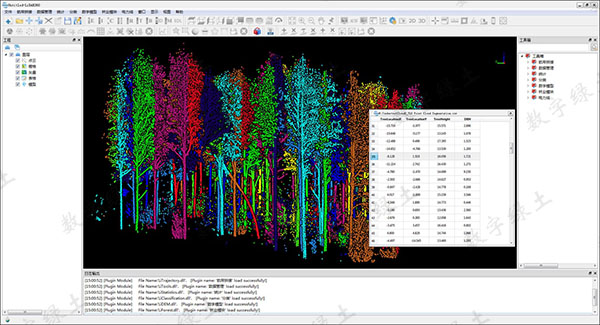
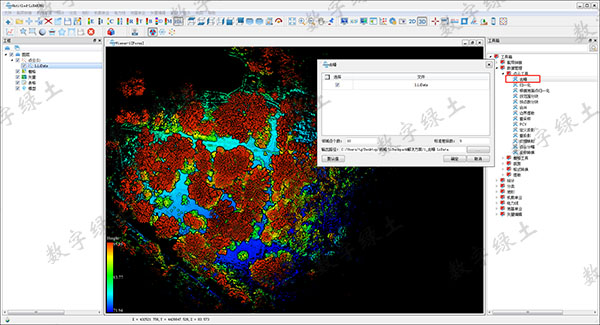
- 将点云数据导入LiDAR360软件;

扫描样区最终结果示意
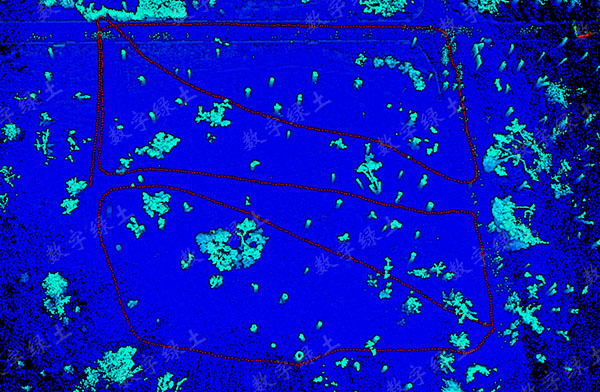
行走轨迹与点云叠加效果
数据处理流程如下:
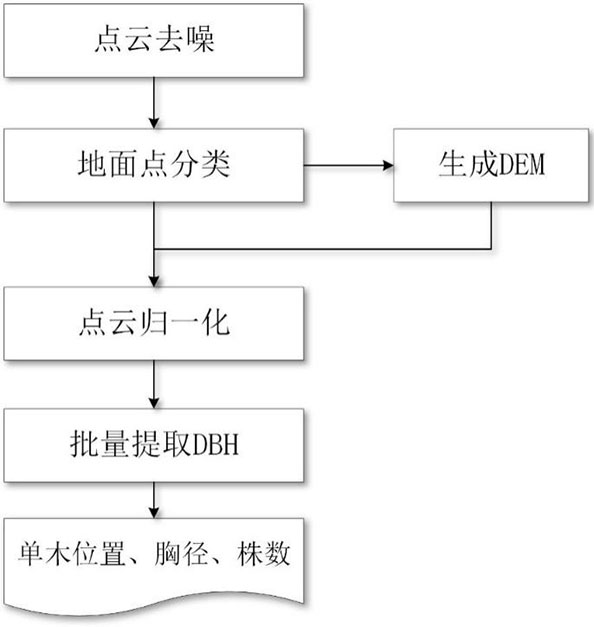
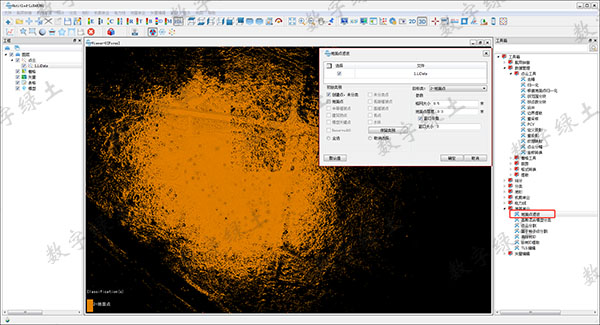
- 去除空中噪点,提高数据质量;
- 从点云数据中分离地面点;
- 基于地面点生成DEM;
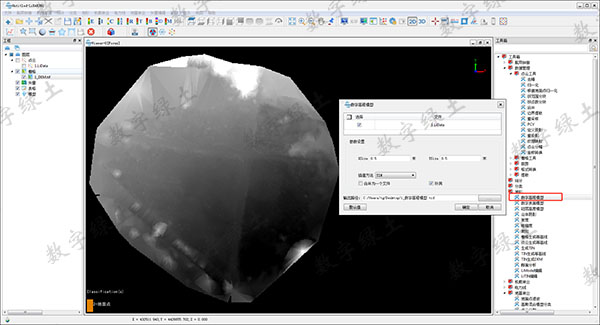
- 利用DEM对点云进行归一化,去除地形影响;
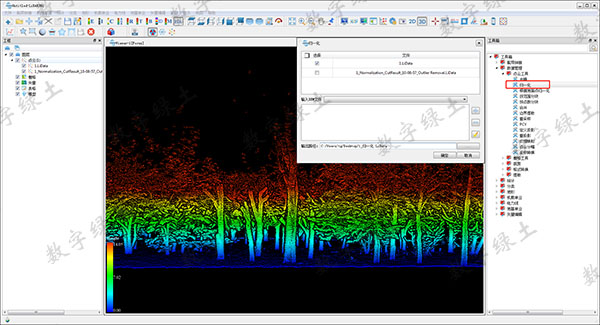
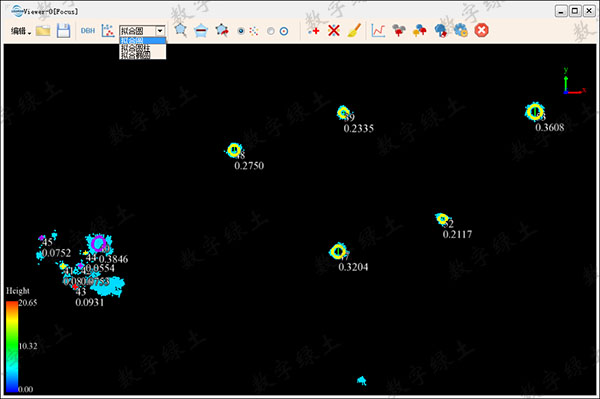
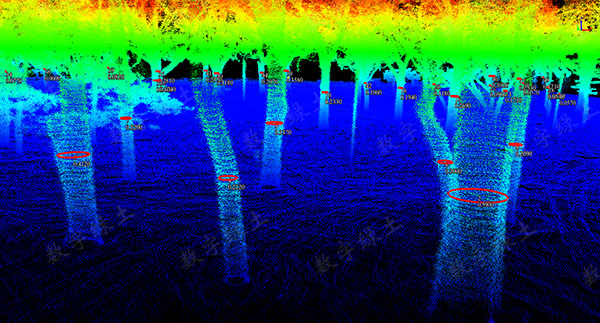
- 选择胸径处(默认:2-1.4m)的点云数据,采用拟合圆的方式批量提取DBH,获取树木ID、胸径和株数。除了拟合圆的方式,软件还提供拟合圆柱和拟合椭圆的方式:如果树木倾斜生长,可选择拟合圆柱的方法;如果树干表现为椭圆,则可使用点云数据的平面坐标利用最小二乘拟合二维椭圆。
自动提取DBH时软件会对聚类出的树干进行置信度判断,根据不同置信度等级以不同的颜色显示,如下图,黄色、紫色和红色分别表示高、中和低置信度。
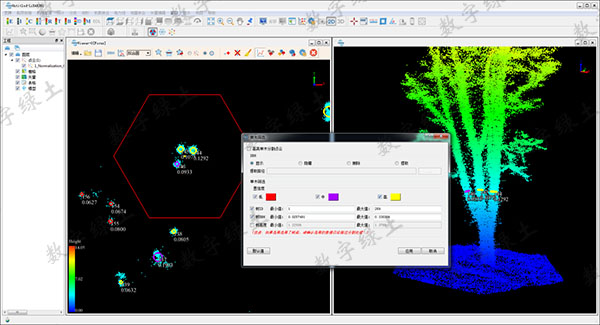
- 通过单木筛选工具对拟合结果进行检查与编辑,根据筛选范围可对DBH拟合结果进行显示、隐藏、删除与提取操作。筛选操作包括:按置信度筛选、按树ID筛选、按DBH筛选以及按树高筛选。
- DBH拟合结果可以保存为csv文件,其中包含树ID、树的位置和DBH。
四、效率/精度验证
选取某林区进行进行测试,评估LiBackpack的效率及精度。
1、试验区:
北京植物园针叶林样地,选取长宽分别为40米和20米的样地作为研究区。
2、目标数据:
研究区内15棵树的胸径值。
3、采集手段:
- 人工测量:使用皮尺在地上3m处测量并记录树木胸径。
- 地基激光雷达设备: FARO FOCUS3D 120相位式激光雷达,为了完整获取树木的胸径点云,架设8个站点。
- 便携式移动激光雷达系统:LiBackpack背包激光雷达对,测区进行移动扫描。

样地

人工实测树木胸径

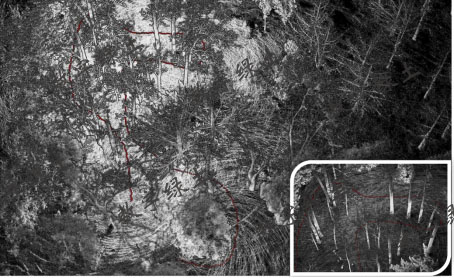
FARO扫描

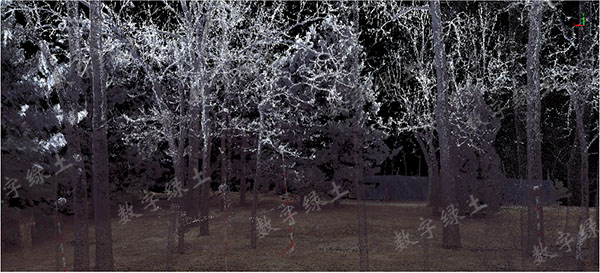
LiBackpack扫描
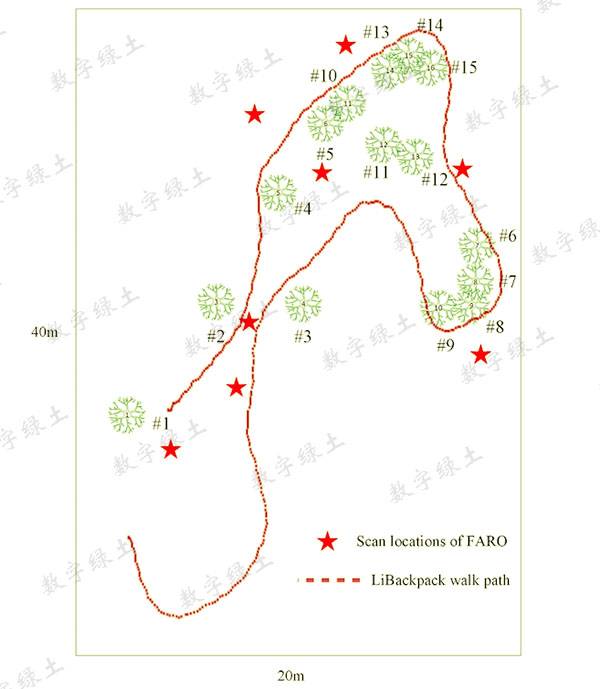
实验区示意图
4、数据处理
LiBackpack可输出LAS或PLY格式的点云,倒入LiDAR360软件进行显示和处理;
LiBackpack采集的点云数据

LiDAR360进行胸径拟合,测出数值
FARO采集的原始数据为厂商自定义的工程文件格式FLS,通过扫描仪配套软件处理后导出为TXT格式,包含点云坐标和颜色信息。
FARO点云数据
效率对比

对比分析:
人工测量方式耗时15分钟;
FARO架站扫描每站扫描时间为6分钟左右(同步获取点云和影像,可导出真彩色点云),共架设8个站,此外加上布设标靶球、搬站、拼接等,数据获取及处理总时间大约为2小时;
LiBackpack支持实时获取和解算点云,整个样地数据获取时间大约为127秒。
精度对比
对比人工量测、LiBackpack、FARO获取的15棵树的实测胸径值,单位为cm。
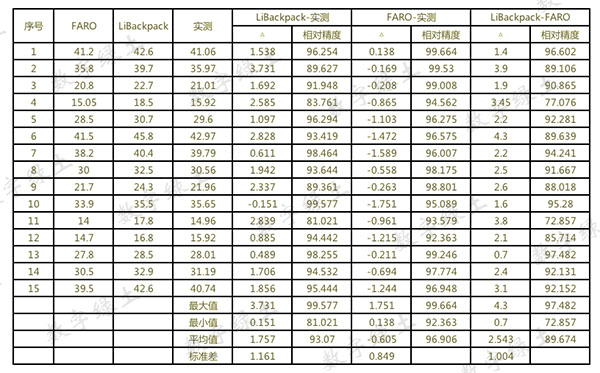
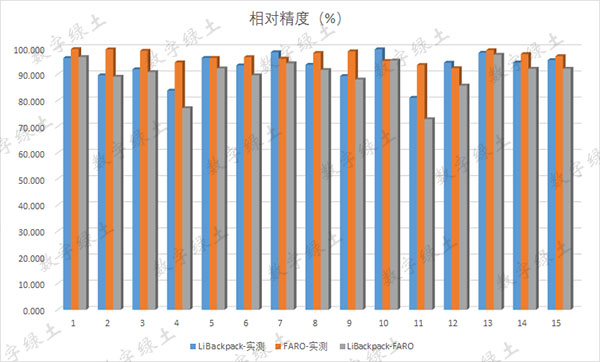
对比分析:
LiBackpack与实测值相比,平均误差为1.757cm,标准差为1.161cm;FARO与实测值相比,平均值为-0.605cm,标准差为0.849cm;
LiBackpack与FARO相比,平均值为2.543,标准差为1.004cm。
总结:
LiBackpack在精度可达到厘米级测量精度,能够满足林下结构数据的采集和提取;LiBackpack在效率上能以更好的性价比满足作业。