
特斯拉举办“Autonomy Day”正式发布全自动驾驶计算机当天,马斯克表示其计算性能秒天秒地、吊打英伟达,同时还说激光雷达毫无必要。
一、激光雷达与影像之争
马斯克说:“Lidar is a fool’s errand. Anyone relying on lidar is doomed. Doomed! [They are] expensive sensors that are unnecessary. It’s like having a whole bunch of expensive appendices. Like, one appendix is bad, well now you have a whole bunch of them, it’s ridiculous, you’ll see.”
真是一石激起千层浪,整个无人驾驶行业都跳出来反对马斯克的观点。在专业人士看来,这纯属马斯克提升自家产品热度的专业操作,套路满满,而激光雷达玩家也都默契的选择配合,毕竟马斯克是个超级IP,一起玩的都是老司机。
事实上,激光、影像之争由来已久,早在无人驾驶还没火起来之前,在地球观测与导航领域,对激光雷达与可见光遥感哪个更好的争论已持续多年,最终双方握手言和,谁也取代不了对方。
二、激光雷达和无人驾驶
在无人驾驶领域,尽管激光雷达派一再强调LiDAR在深度检测方面的优势,以及单纯视觉无法应对全天时全路况挑战,视觉派仍然认为摄像头是唯一正确选择。视觉派很重要的一个观点是:人靠双目就能安全开车,无人驾驶汽车一定也可以靠摄像头安全驾驶。
问题是,有人驾驶的汽车比无人驾驶的飞机事故率要高很多很多,无人驾驶汽车的安全水平压根就不应该只与人类驾驶看齐。即便是仿生,也不应只用摄像头直接仿生双目,就像飞机的机翼永远不像鸟类翅膀不停煽动一样。
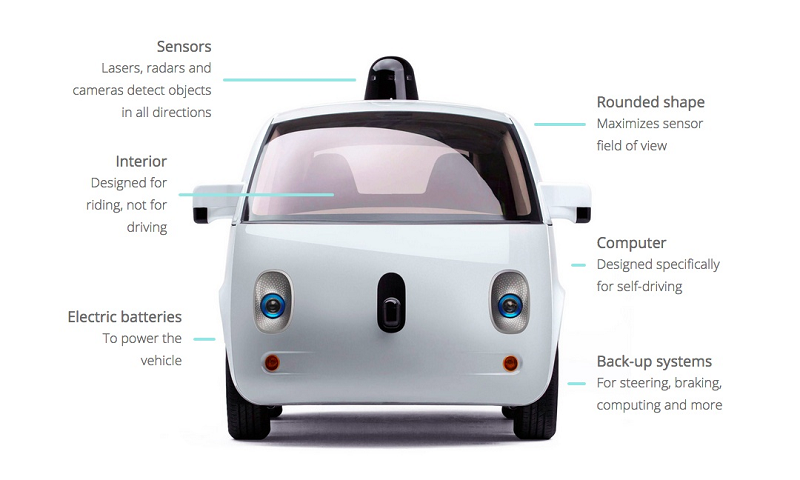
无人驾驶汽车的成功涉及高精地图、实时定位以及障碍物检测等多项技术,而这些技术都离不开LiDAR。激光雷达在无人驾驶技术中的应用包括地图绘制、定位以及障碍物检测。google的无人驾驶汽车用到了LiDAR来测量汽车和其周围物体的距离。
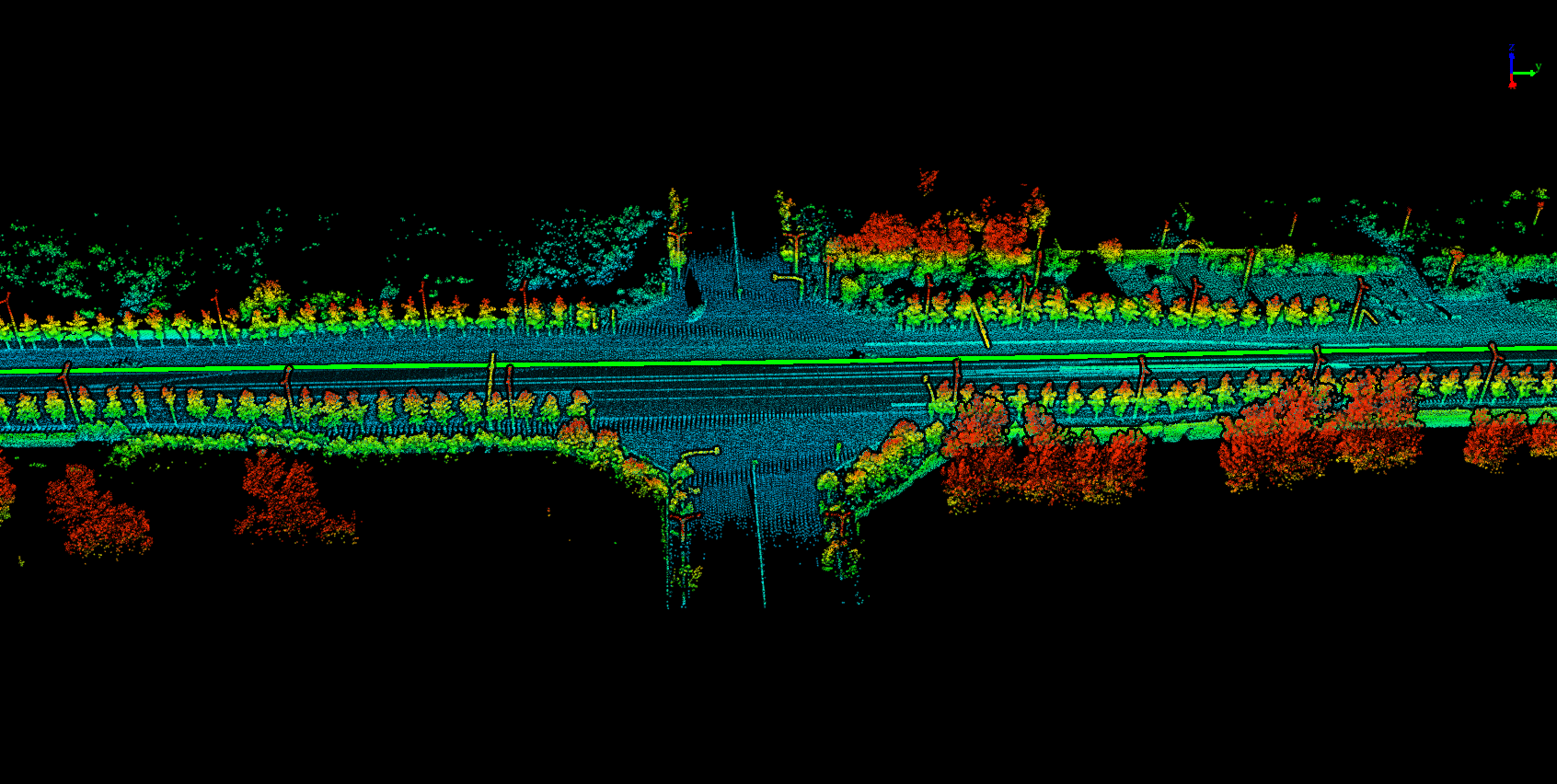
LiMobile车载激光雷达系统对道路进行三维点云信息采集
激光雷达利用发射和返回脉冲个之间的时间差来确定距离目标物体的实际距离,优势在于测距精确,可以达到厘米级别的精度,为无人驾驶的后续算法提供了数据保障。在3D环境感知方面,激光雷达通过实时扫描车辆行驶过程中周围障碍物(静态和动态),依靠点云分类算法对目标区域内点云进行分割和分类(路面、车辆等),然后将结果输出给控制决策层,由控制决策层根据对结果的判定实施车辆行为决策如继续行驶、超车、停车等。
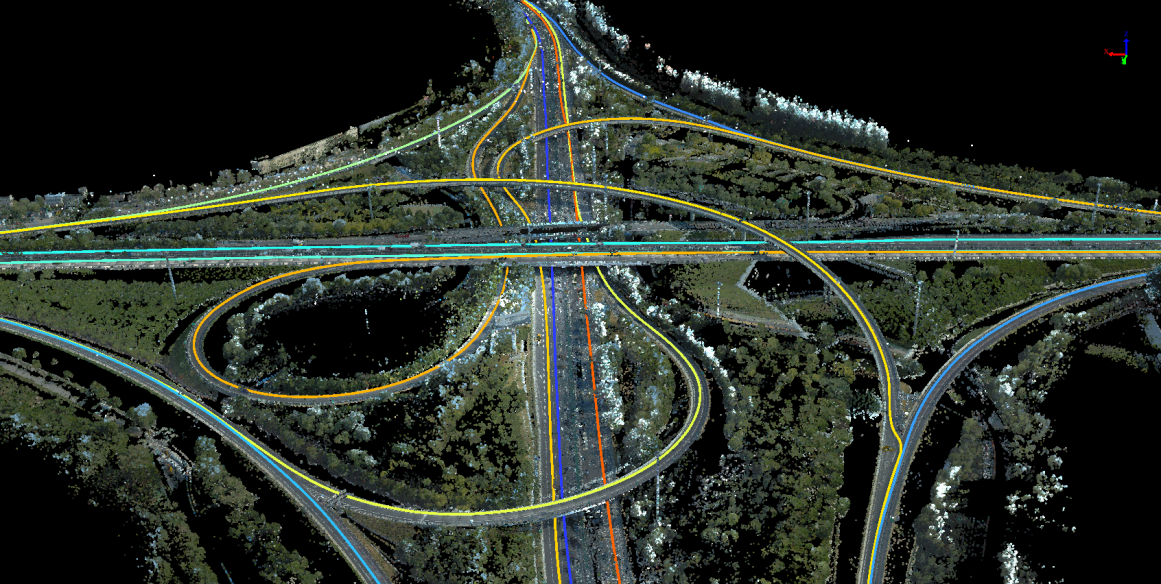

利用LiDAR获取的道路周围信息和特征判断
无人驾驶的高精地图不同于我们日常用到的导航地图。高精地图是由众多的点云拼接而成,主要用于无人车的精准定位。高精地图的绘制也是通过LiDAR完成的。安装LiDAR的地图数据采集车在想要绘制高精地图的路线上多次反复行驶并收集点云数据。后期经过人工标注,过滤一些点云图中的错误信息,例如由路上行驶的汽车和行人反射所形成的点,然后再对多次收集到的点云进行对齐拼接形成最终的高精地图。
在辅助定位方面,可以利用点云扫描结果提取特征,并与高精地图的数据进行对比匹配,从而获取精确的物理位置。或者基于点云的反射值强度,做基于反射值强度的概率匹配进行定位(百度apollo定位算法采用是这种方法),可以达到厘米级的定位精度。激光雷达弥补了其他传感器的精度短板,可实现全天候全天时的监测。

数字绿土自主研发车载激光雷达扫描系统——LiMobile
三、离开LiDAR的无人驾驶之痛
美国东部时间2018年3月19日晚,一辆 Uber自动驾驶汽车在亚利桑那州坦佩市的公共道路上与一名行人相撞,该行人在送往医院后不治身亡。
2018年3月23号,在加利福尼亚州山景城101号高速公路上,一辆蓝色的特斯拉Model X在向南行驶时,撞上中间隔离栏后汽车发生起火,之后又被车道后方驶来的一辆马自达和一辆奥迪相继撞上。特斯拉的司机被送到医院后因伤重不治而死亡。
2018年5月14日晚间消息,据美国犹他州南约旦市(South Jordan)警方周一称,上周五一辆特斯拉Model S电动汽车以每小时60英里(约合96.5公里)的速度撞上了一辆卡车。
……
对生命的敬畏恰恰是科技进步最大的动力,愿所有为科学献身的灵魂都能得到安息。
特斯拉在“自动驾驶”方面确实还是需要很长的路要走,整个世界在这个领域也是很长的路要走。当前人工智能的算法还不够成熟,单纯摄像头解决方案已经被证实是有缺陷的,纯视觉传感器的无人驾驶方案在安全性上还存在较多问题。自动驾驶目前第一要解决的问题是安全,还远远没有到讨论使用某个传感器是否必要的问题。
特斯拉出的交通事故,都是由于没有识别出前方静止或低矮的障碍物所导致的。而激光雷达恰恰能够在这方面提供有效的帮助,其探测距离较远,能够准确获取物体的三维信息,稳定性相当高,鲁棒性好。只要能够解决哪怕“万分之一”概率的安全性问题,多一个激光雷达“昂贵而冗余”的传感器又如何。何况强如Google,目前不也还没开发出脱离激光雷达的自动驾驶方案么,因此现阶段的无人车的开发还离不开激光雷达。
数字绿土自动驾驶视频
我们可以肯定的是,无人驾驶是汽车的未来,但众多传感器是实现无人驾驶必不可少的,尤其是激光雷达,必是其中之一。