在运行变电站点的日常工作中,运行人员受工作经验及工作能力等方面因素限制,在日常巡视、布置安全措施等工作中有误碰带电设备的安全隐患,电力系统内误入间隔误碰带电设备情况频发。比如在变电检修过程中,检修人员在部分间隔停电过程中面对相邻带电间隔仅依靠人工目测安全距离难以精确,有可能导致检修人员和机械设备发生触电事故。而外来施工人员因工作状态不佳或对厂站不熟悉等原因,在日常巡视、布置安全措施、现场检修等工作中有误碰带电设备的安全隐患,电力系统内类似事故事件层出不穷。因而变电站安全距离的计算十分重要,但是目前没有很好的计算方法能够准确、快速的对变电站的安全距离进行很好的计算。
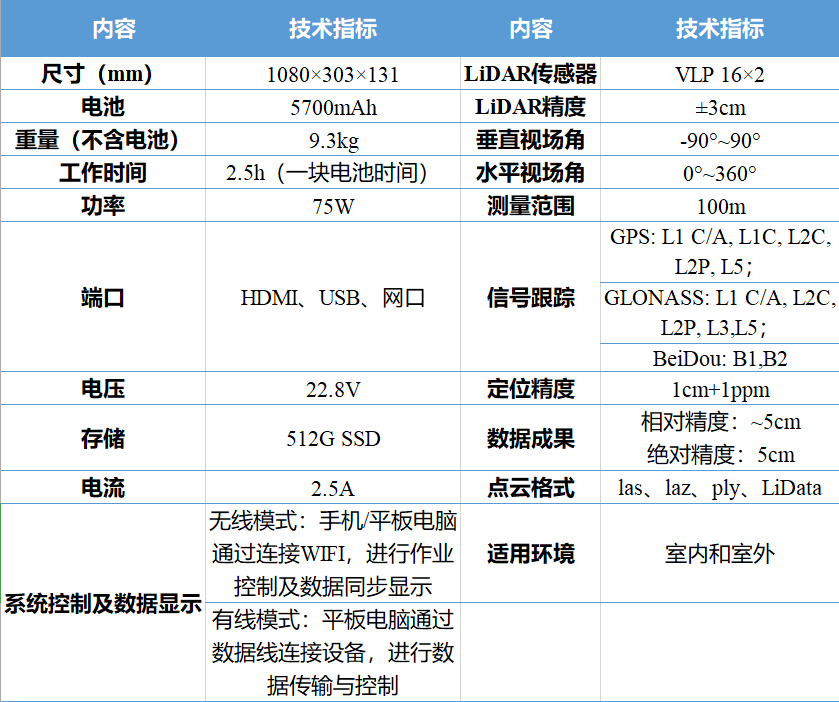
通过高精度的激光雷达点云结合三维SLAM技术方法计算安全距离,将点云数据分为带电导线、地面设备设施和带电作业安全距离智能分析或人工量算,全面检测带电导线、设备安全作业距离,确保站内施工过程中人员的工作安全,降低作业风险,满足站内施工安全规范要求,同时通过获取高精地图,准确、主动规划行走路线。

SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建,或并发建图与定位。SLAM最早由Smith、Self和Cheeseman于1988年提出。
它是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程。随着传感器种类和安装方式的不同,SLAM的实现方式和难度会有很大差异。按传感器来分,SLAM主要分为激光、视觉两大类。其中,激光SLAM研究较早,理论和工程均比较成熟。视觉方案目前(2018)尚处于实验室研究阶段,极少看到实际产品应用。
目前,SLAM的用途包括传感器自身的定位,以及后续的建图、路径规划、场景理解等,应用领域主要有机器人、增强现实、室内测图、林业测量、工地测量及机器人领域。
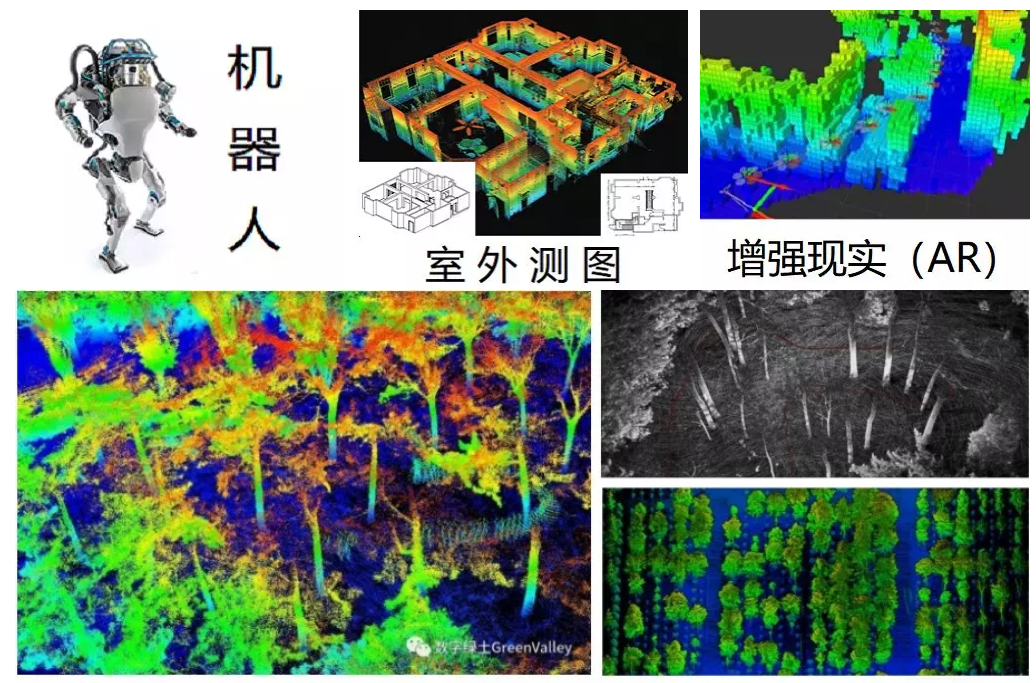
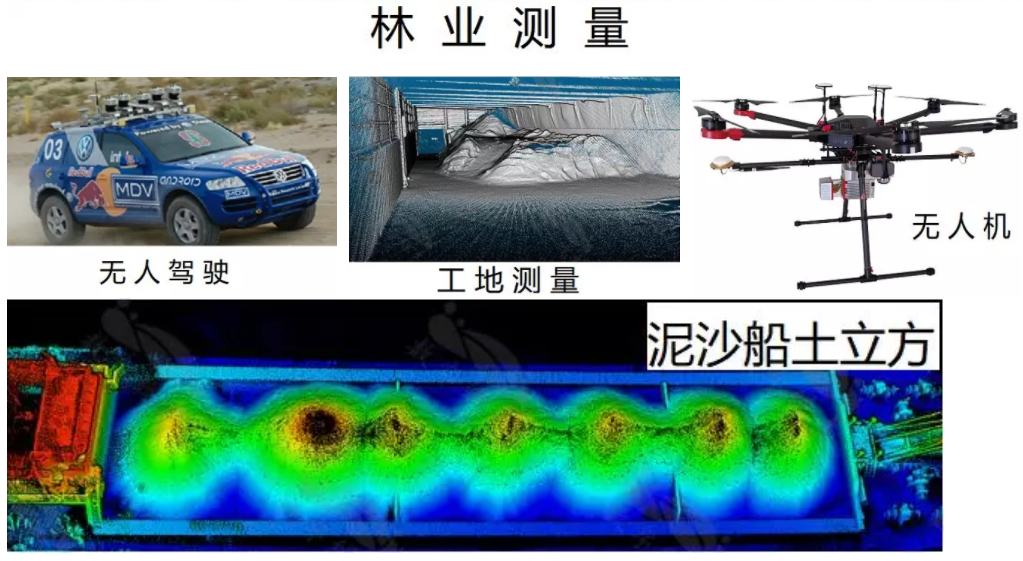
图1 SLAM应用领域

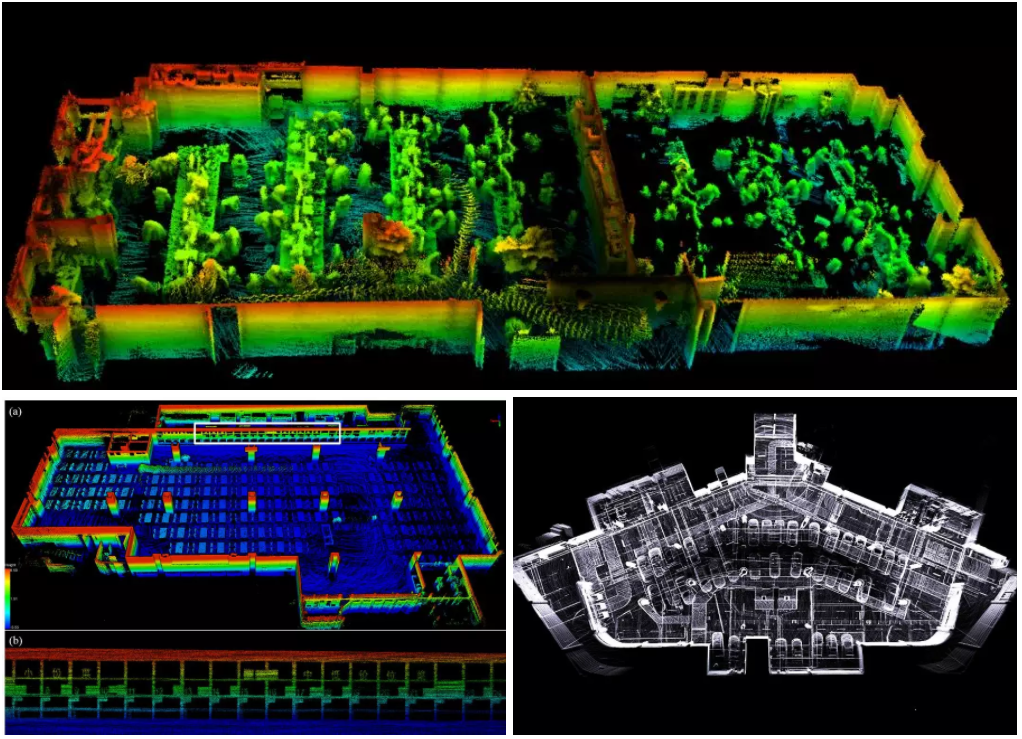
三维SLAM在扫描瞬间获取的激光点云信息是三维的,能准确地识别出地物的空间特征。
利用高精度的激光雷达点云结合三维SLAM技术进行数据采集,点云数据智能分类处理,数据分类将点云数据分为带电导线/带电导体和地面设备设施实现带电作业安全距离的智能分析计算或人工实时量算;全面检测带电导线、设备安全作业距离,确保站内施工过程中人员的工作安全,降低作业风险,满足站内施工安全规范要求。
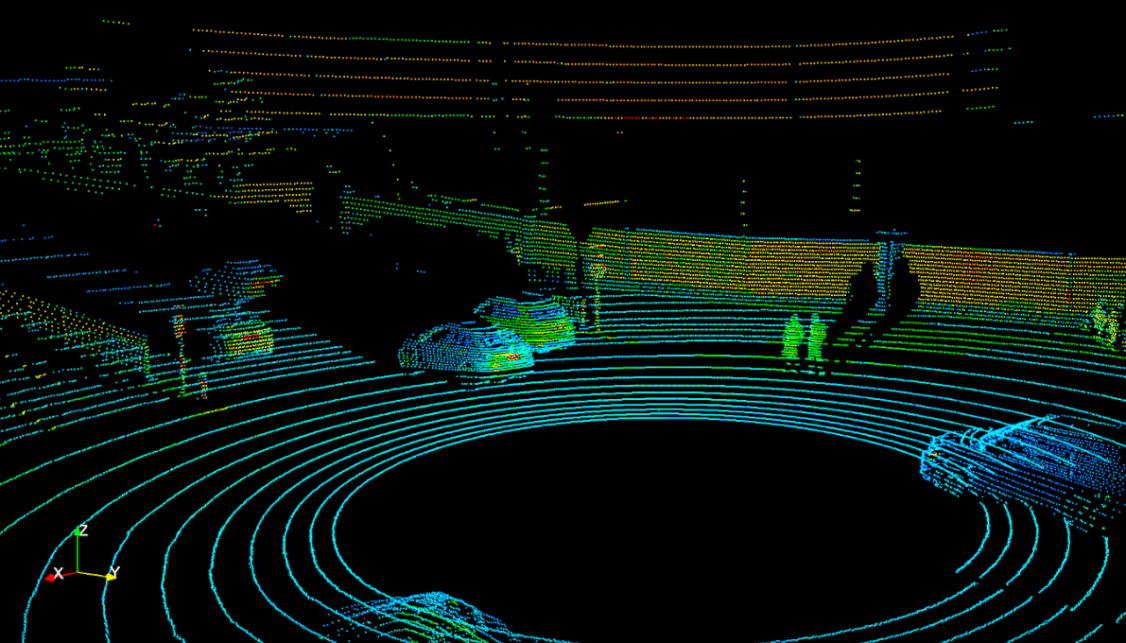
图2 三维SLAM工作原理

图3 安全距离
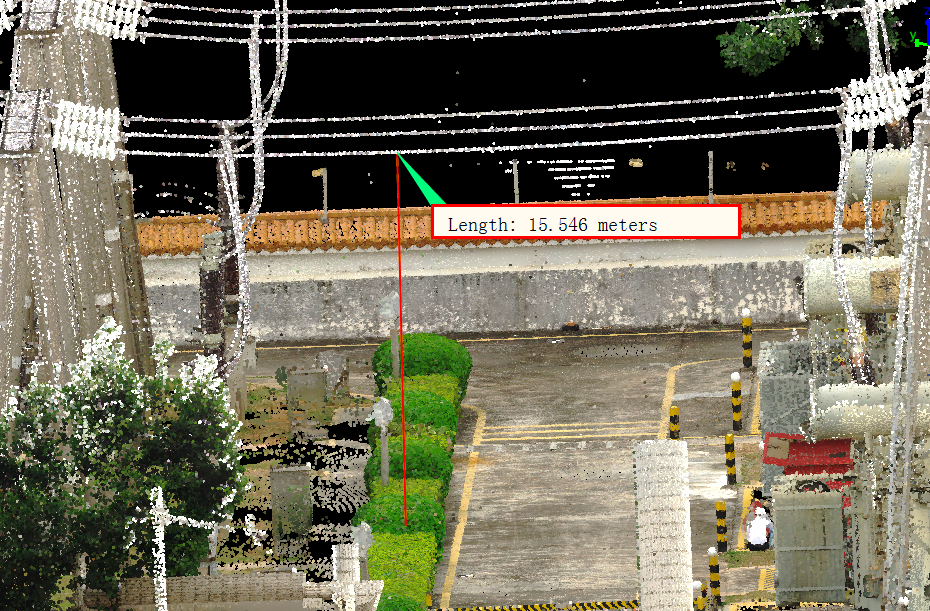
图4 净空距离测量
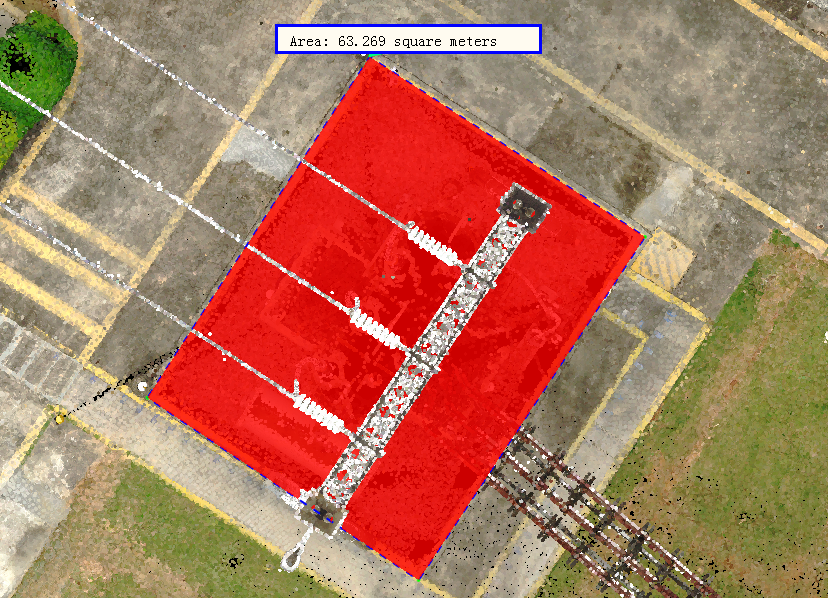
图5 面积测量

图6 体积测量