

根据相关条例规定,每五年进行一次森林资源规划设计调查和园林绿地普查工作,查清森林、林木、林地和城市绿地资源的种类、数量、质量与分布,客观反映调查区域自然、社会经济条件和经营管理状况,综合分析、评价绿化资源与经营现状,提出对绿化资源培育、保护、利用意见,为各级政府及有关部门制定政策、实施管理提供科学依据。主要普查内容包括各类林地的面积和权属,各类森林、林木蓄积,四旁树的株数和蓄积,农田林网的控制面积和分布情况,森林经营情况、经营措施与经营成效,城市绿地的面积和分布,城市绿地的植物情况等。
本方案的普查对象是市域内生长的所有森林、林木和林地,城市绿地、植物。森林、林木和林地是指有林地、疏林地、灌木林地、未成林地、苗圃地、无立木林地、宜林地、林业辅助生产用地以及农田林网、四旁树、古树名木等;城市绿地、植物是指规划市区范围,以及新城、中心城镇和建制镇规划范围的绿地和植物。

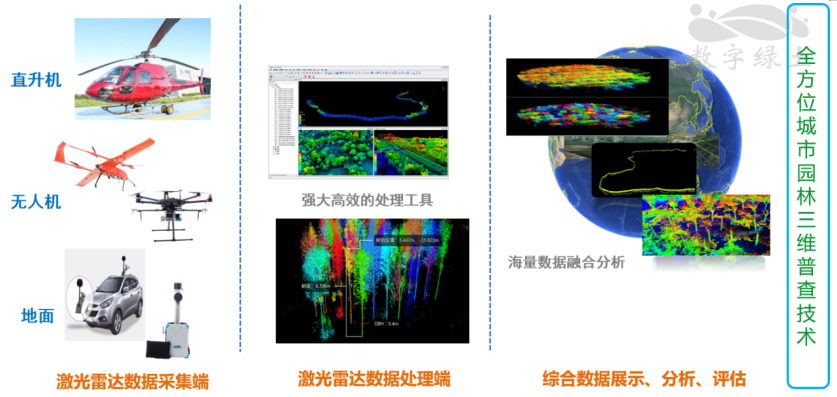
利用激光雷达、影像和调查需求的结合,一方面,可以通过不同的遥感手段,对森林内部的详细信息进行及时的采集,全面、准确、客观的对森林的分布状况进行有效的掌握;另一方面,利用激光雷达技术获取的高精度遥感数据,能够进一步分析处理得到城市园林中每棵树的位置、高度、胸径、冠幅,可以减少人工调查工作量,提高园林调查的效率和准确度,节约人力成本。
技术路线
通过对采集到的激光点云数据进行处理分析,可得到以下城市园林普查数据:

2.1数据采集
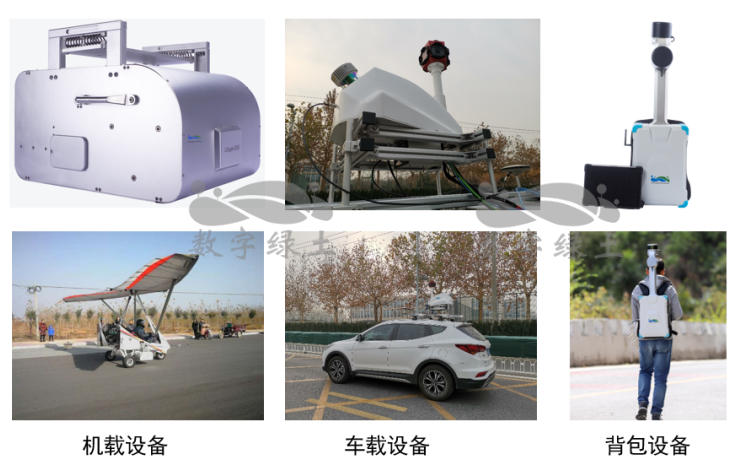
根据采集区域的大小、是否禁飞区域等具体情况,可选择机载激光雷达、车载激光雷达、背包激光雷达等多种设备进行数据采集。各平台采集的数据示例如下:
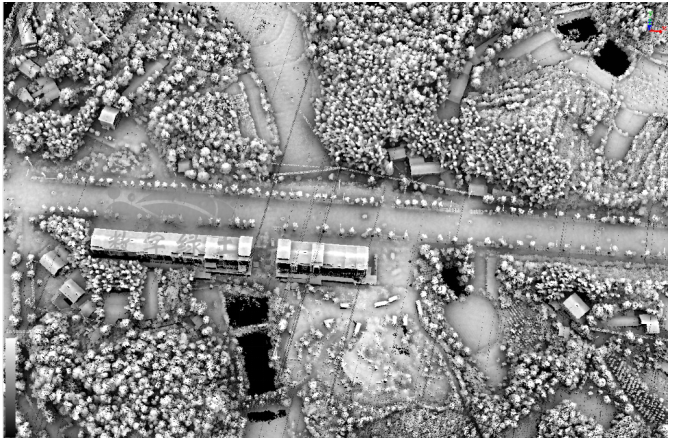
机载激光点云数据
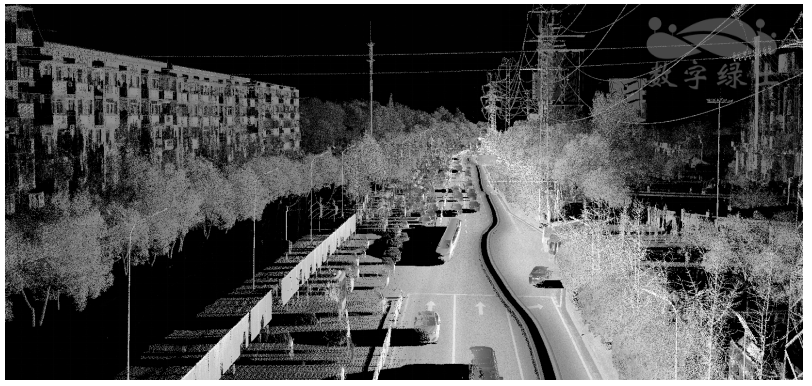
车载激光点云数据
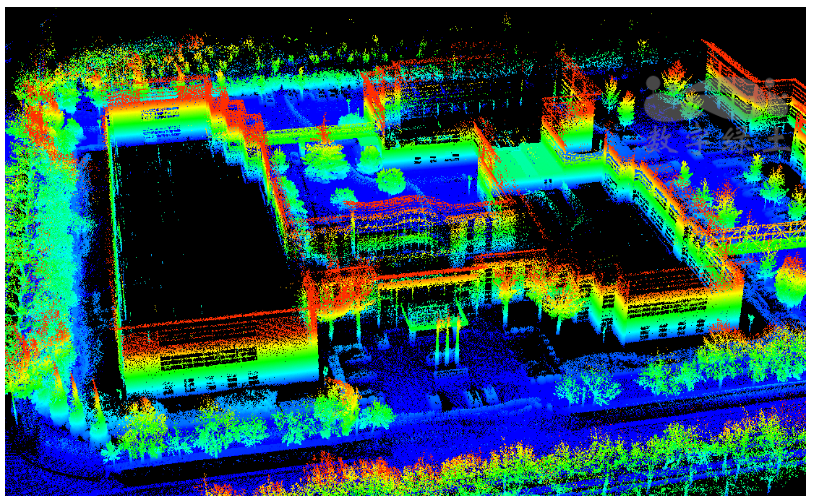
背包激光点云数据
2.2数据处理
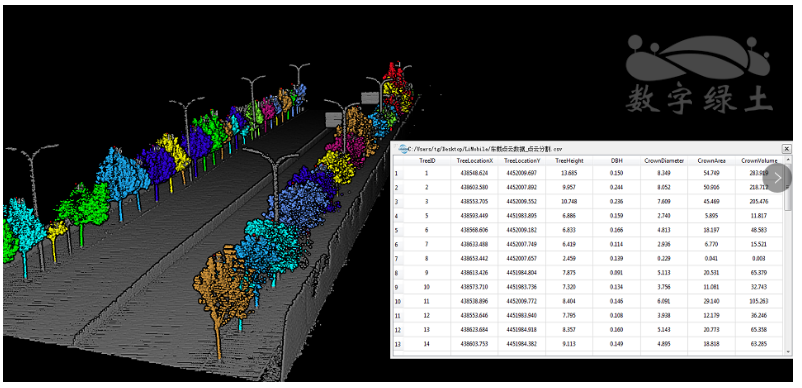
数据采集完成后,采用LiDAR360软件进行后续去噪、分类、单木分割等处理,并提取得到相关成果数据。
1)林木位置、高度、胸径、冠幅等信息提取
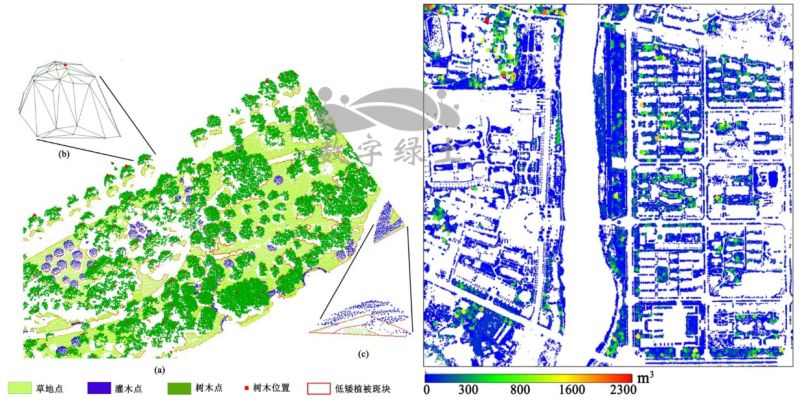
2)三维绿量计算
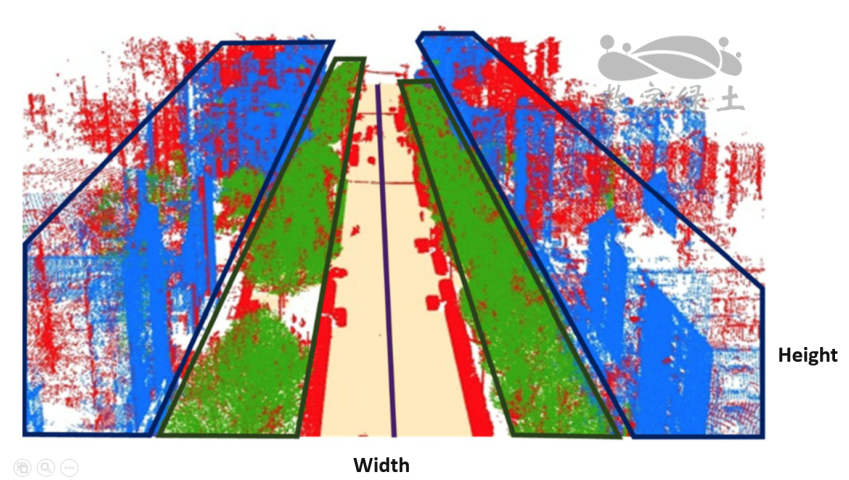
3)道路两旁植被建筑宽高信息提取
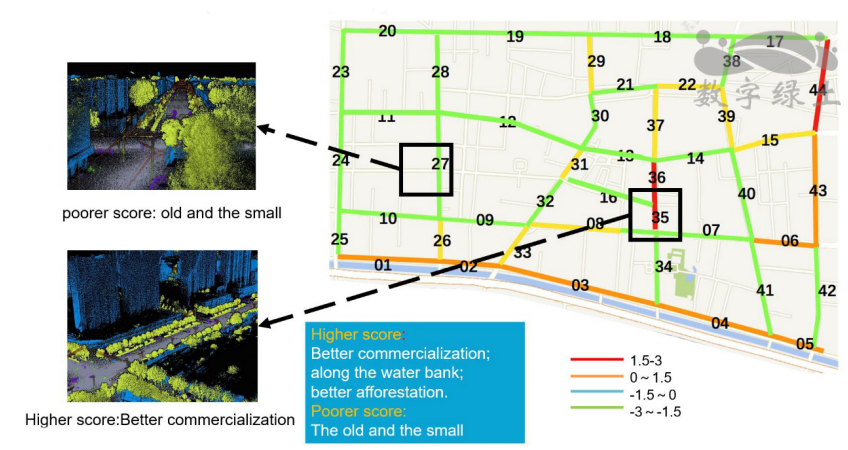
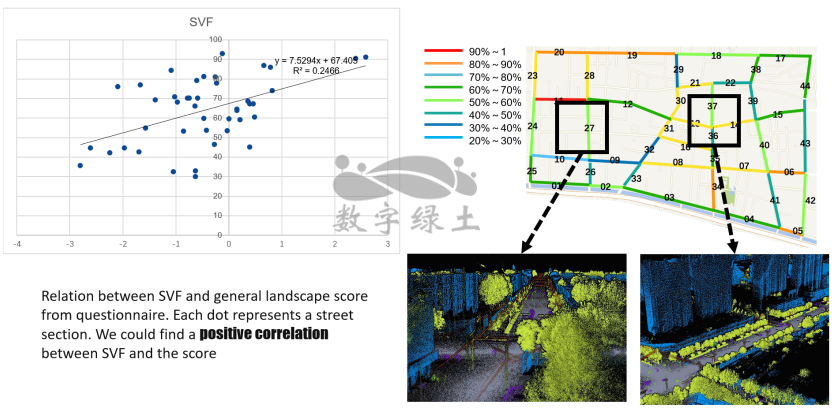
4)道路两旁景观评价
5)视域分析

3.1 双激光头背包案例
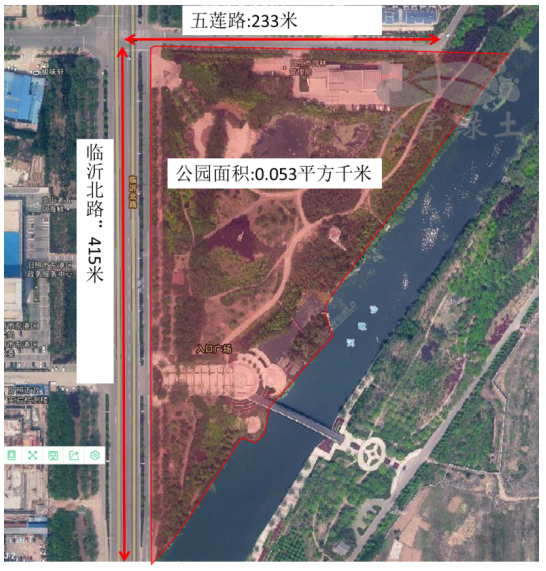
1)测区介绍
2018年8月13日对日照市城市绿地植被及设施信息进行试验采集,本次借助激光雷达扫描仪,共完成临沂北路(济南路-五莲路段)、五莲路(临沂路-沙墩河段)、沙墩河公园(临沂路-五莲路部分)三块绿地的数据采集。其中,临沂北路(济南路-五莲路段)采集道路长度为415米;五莲路(临沂路-沙墩河段)采集道路长度为233米;沙墩河公园(临沂路-五莲路部分)采集面积为0.053平方千米。
2)数据采集处理情况
- 本次采集按照实地地物类型,将城市绿地要素分为植物要素和园林设施两大类。其中,植物要素分为乔木、灌木、球型植物、草坪地被、水生植物五类。
- 外业:采用双激光头背包LiBackpack D50进行数据采集,总计外业采集时间4.5个小时。

数据采集
- 内业:使用LiDAR360软件进行数据预处理和分析,1人2天时间完成整个内业工作。
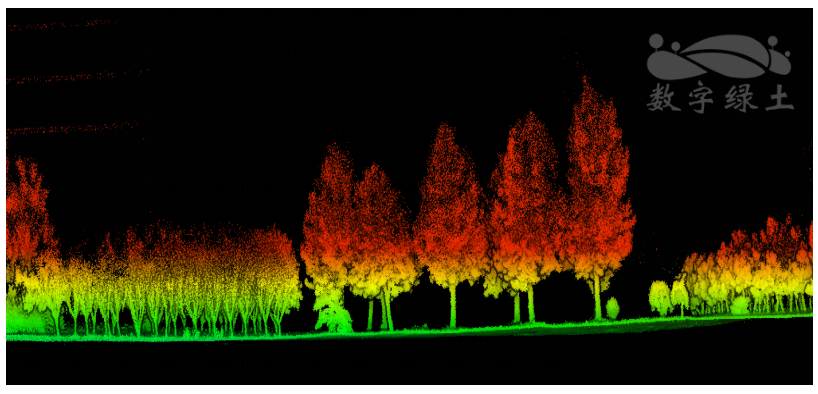
原始点云数据
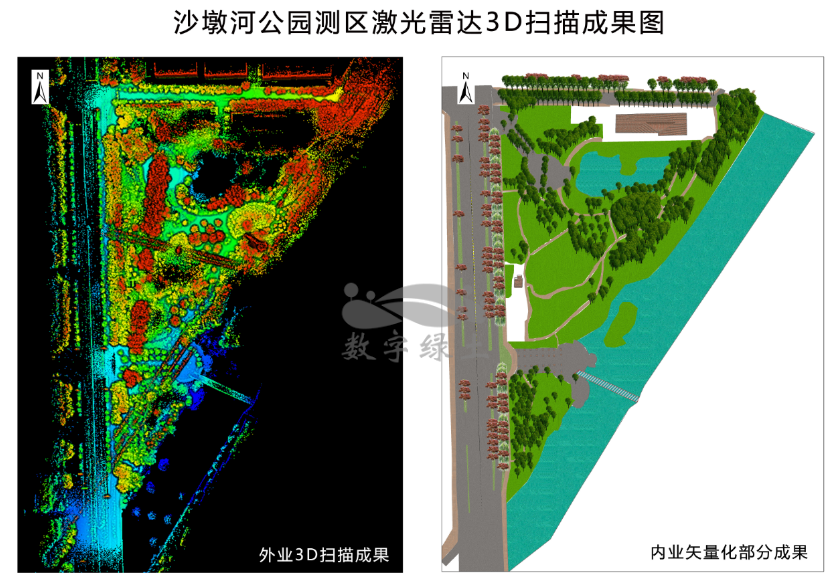
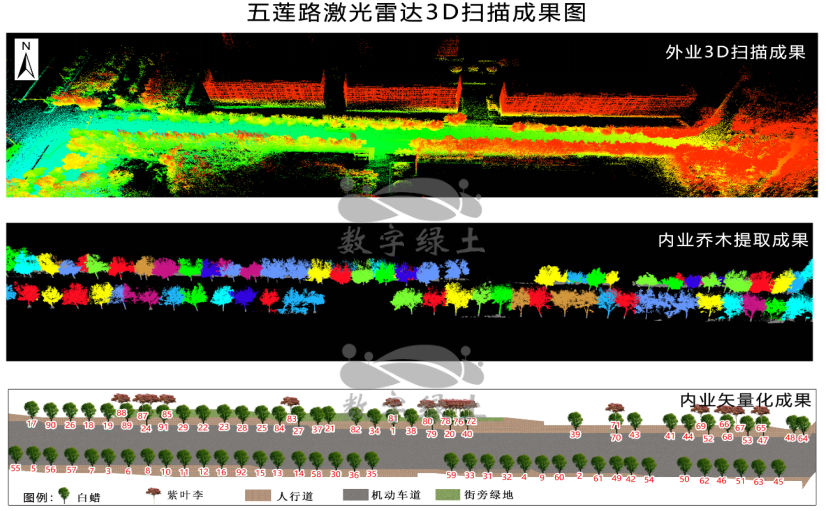
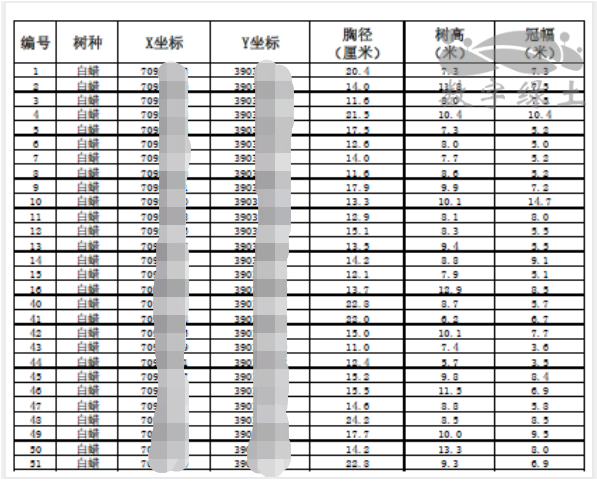
树木信息提取
3)成果数据实地验证
(1)乔木数量验证:
① 五莲路路北一侧(从西至东)
行道树(靠内一排):缺少1棵(识别正确率98.5%)
花坛内小乔木:共65棵,成果中有61棵。(识别正确率94%)
② 五莲路路南一侧(从西至东)
行道树:缺少2棵(现场的倒数第1棵、倒数第8棵缺少,识别正确率98%)
(2)胸径精度验证:
① 误差平均值为1.5cm
② 五莲路路北一侧(从西至东),只有第1棵胸径量算误差较大(实测胸径5.2cm,成果中为8.4cm)
3.2 多平台(机载+车载+背包)数据融合案例
为全面掌握晋州市园林绿化面积,采用机载、车载、背包等多平台激光雷达系统对晋州市城区进行数据采集。对市区内两个大的公园和主要道路的行道树采用激光雷达进行扫描,获取高精度三维点云数据,并通过LiDAR360软件自动提取树木坐标、胸径、树高、冠幅以及绿地面积,补充调查完善园林绿地因子。
测区位置示意图如下:
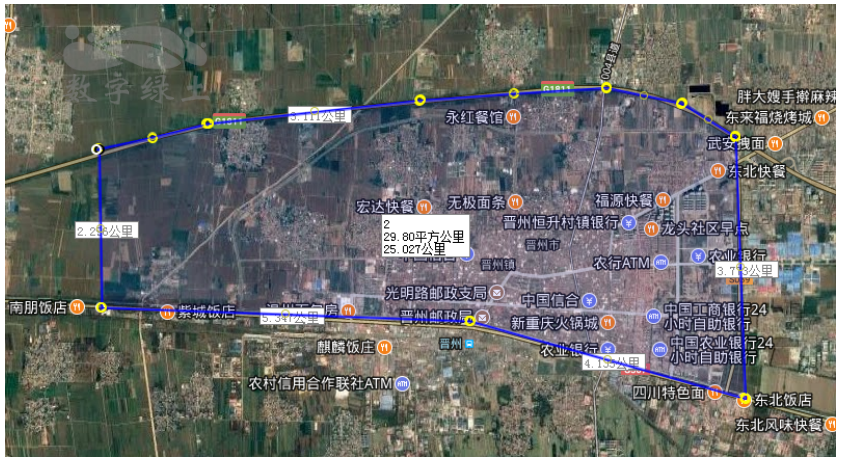
测区位置图
2)数据采集处理情况
(1)数据采集设备
(2)采集得到的数据
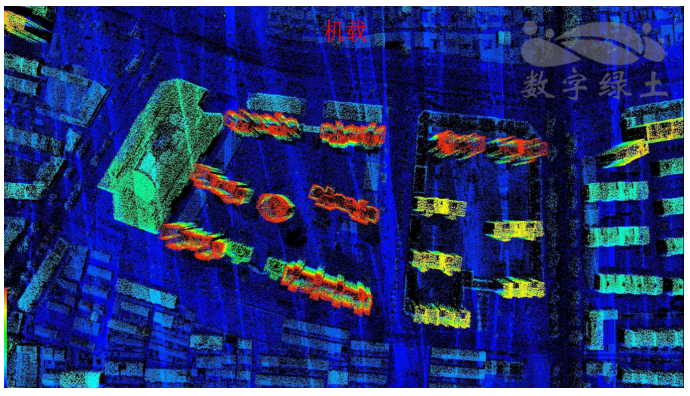
机载数据
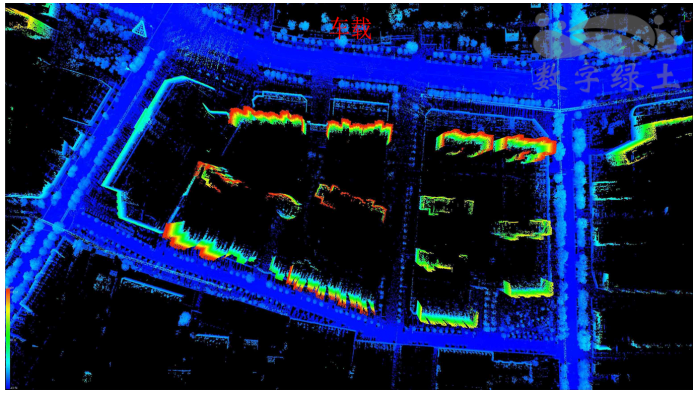
车载数据
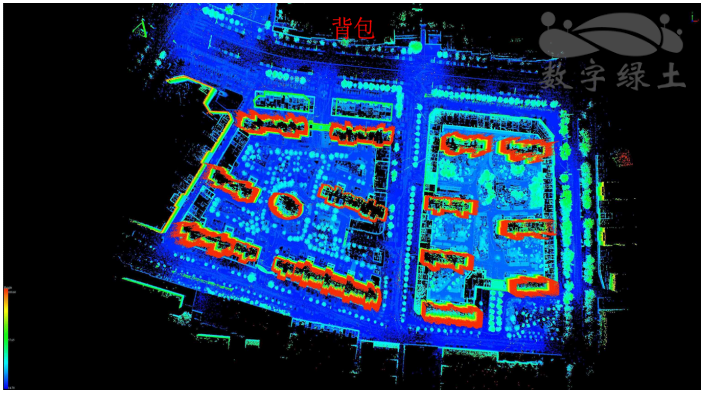
背包数据
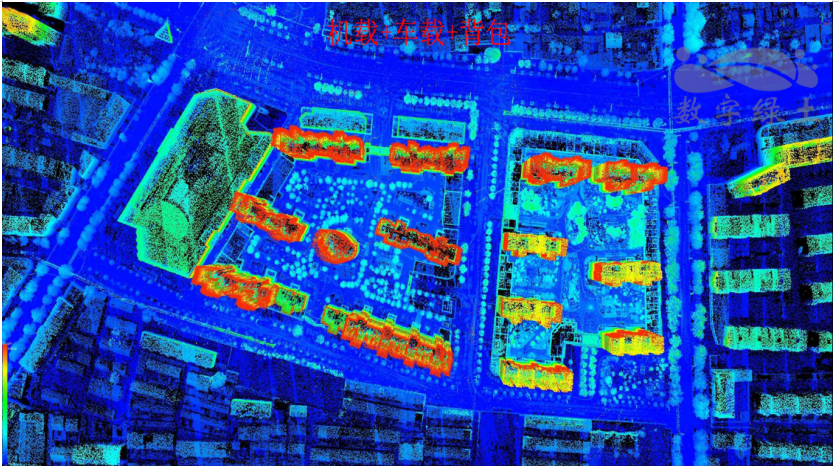
机载+车载+背包数据融合结果
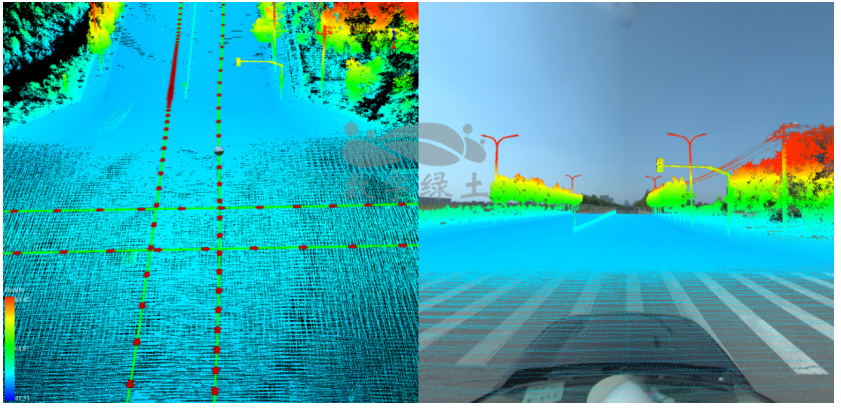
点云+全景影像
多平台融合成果数据局部放大展示:

3)城市园林普查信息提取
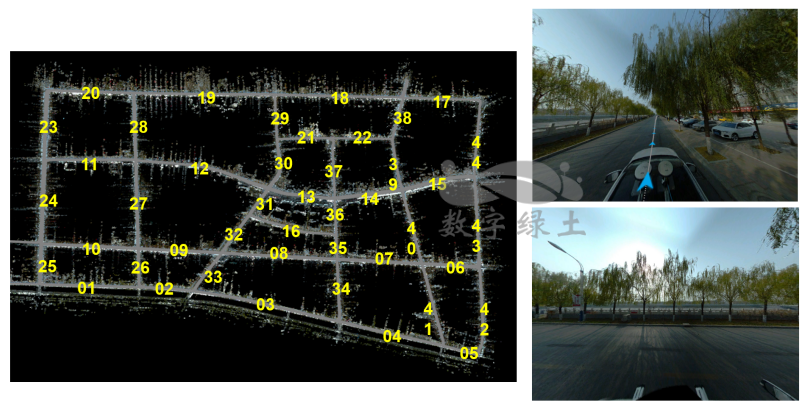
道路数量提取
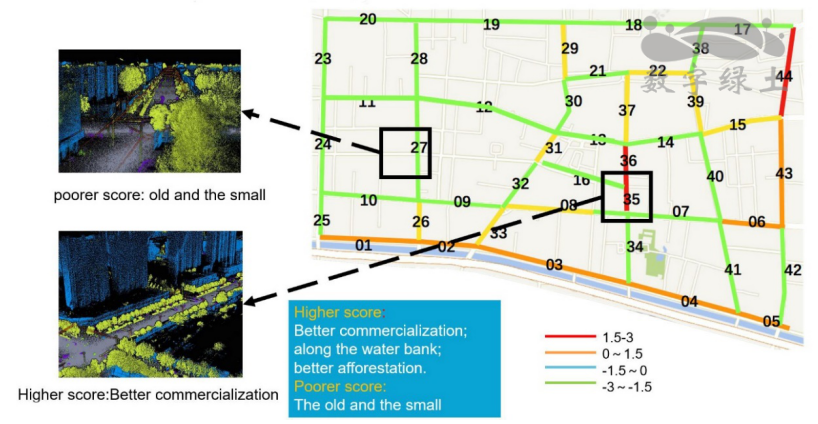
道路两旁景观评价
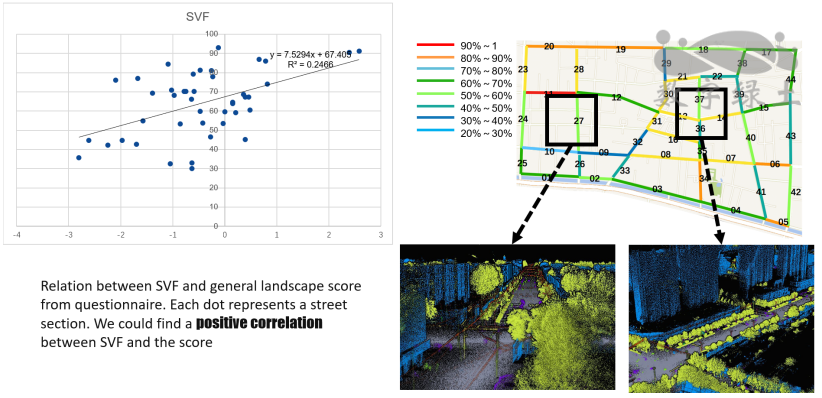
视域分析

道路占地指数
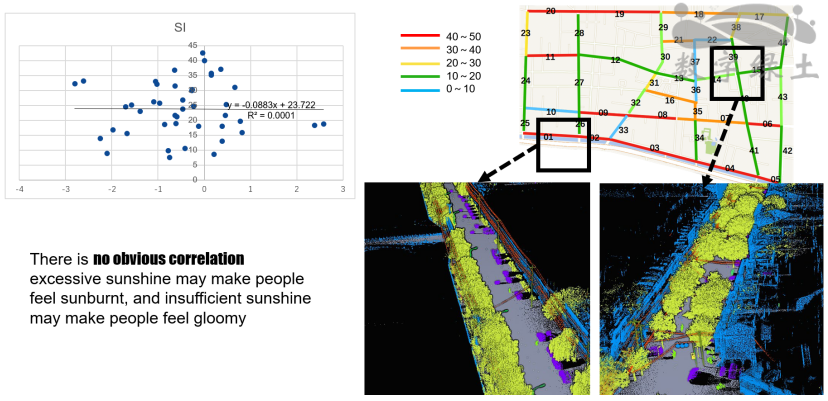
日照指数