

LiAir V 系列是由数字绿土自主研发的轻小型激光雷达点云数据采集系统(集成Livox Mid-40激光器, 基于38.4°有限的视场角),可搭载于M600(重量2.8kg)、M200(重量1.3kg)等飞行平台。产品融入了数字绿土云迹技术,支持无基站作业模式,搭配 LiPlan、LiCloud、LiDAR360、LiPowerline 等系列软件,可为林业调查、地形测绘、电力巡检用户提供数据采集、处理分析、定制化报告等一站式解决方案。

这款LiAir家族的新成员有哪些优点?敲黑板,重点在这里!

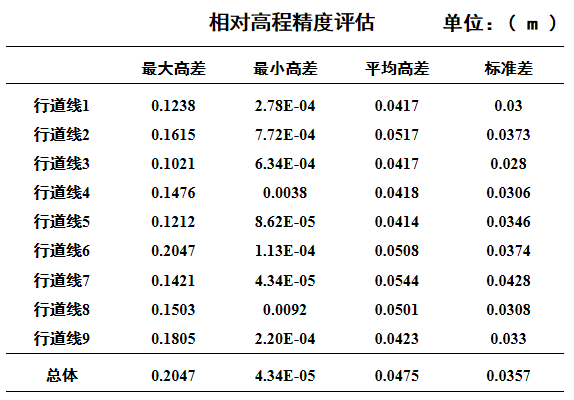
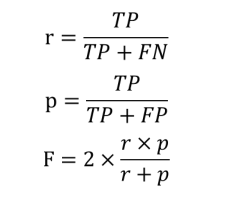
相对高程精度的评定依据平坦水平地物激光点(如行道线点)的共面性,首选从点云数据中选取平坦区域,拟合平面方程,计算评定区域各激光点到拟合平面的距离di ,则相对高程精度为:
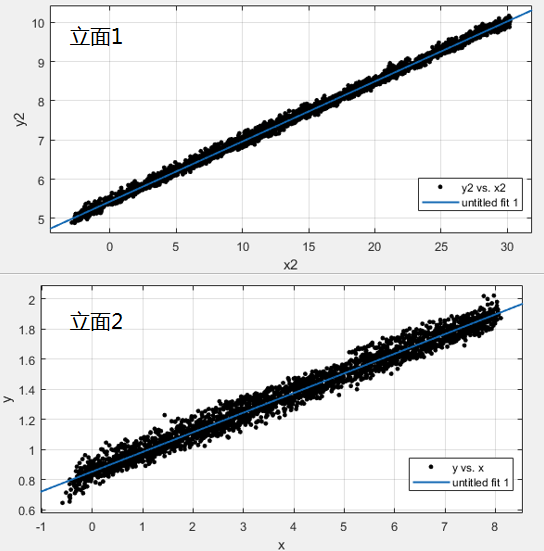
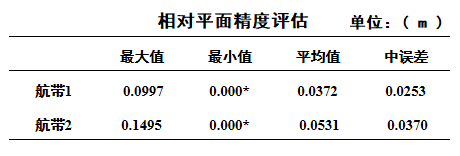
平面精度的评定首先投影房屋立面点到XY平面,拟合直线后计算投影立面点到拟合直线的距离,剔除大于两倍中误差的点后重新计算投影立面点到直线的距离,针对两个航带分别进行了相对平面精度评估,其中实测距离通过皮尺测量和RTK点测量的方式获取。整体来看,系统的相对高程精度在5cm左右,相对平面精度在3cm左右。

森林资源调查对于及时掌握森林资源信息至关重要,森林资源调查的重要内容之一是测量样方内单木的树种、位置、树高、胸径等。激光雷达作为一项成熟的技术已逐步应用于林业资源清查,相比其他技术手段,机载激光雷达手段在大范围、高时效、高精度林木高度与林分垂直结构信息获取方面具有极大的优势。但是,受限于设备费用,激光雷达在我国林业领域的应用此前多停留在研究阶段,轻量,低价的方案可以加速林业信息化建设。
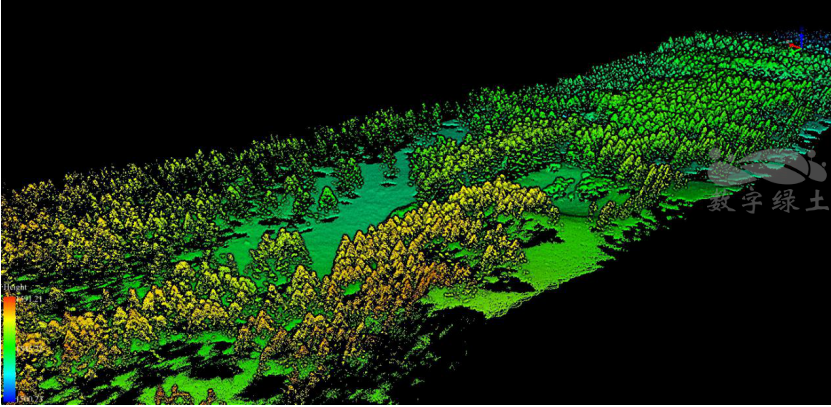
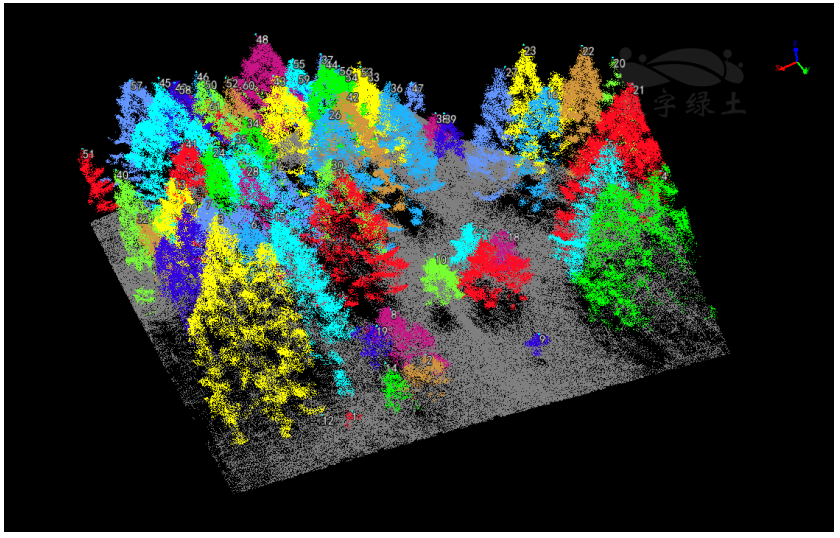
针叶林数据三维显示(LIDAR360中EDL显示模式)
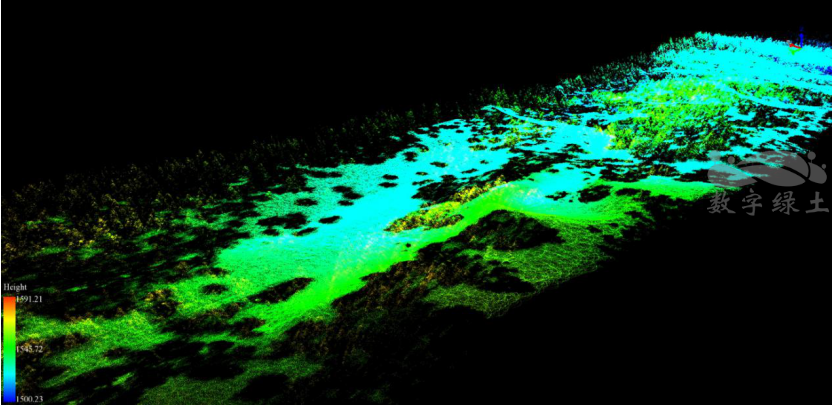
针叶林数据三维显示(LIDAR360中玻璃显示模式)
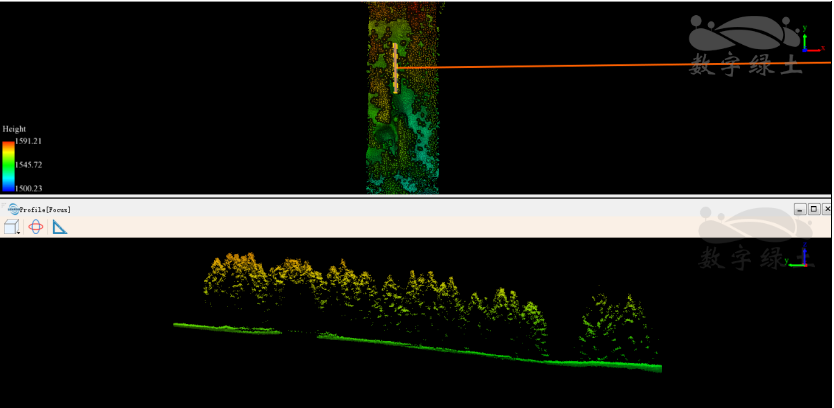
针叶林数据剖面显示(LiDAR360中EDL显示模式)
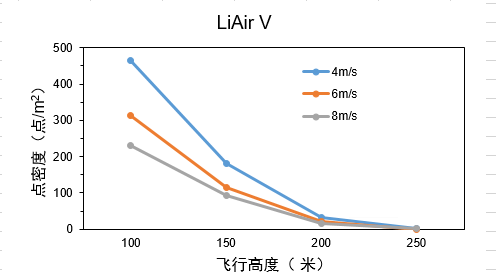
首先,我们选取了不同的飞行高度和飞行速度,分别测试了不同飞行高度和速度下获取数据的点密度(下图),从图中分析可知,飞行高度带来的点密度变化远大于飞行速度,150m高度时点密度骤减。这一现象主要是由于激光器的有限扫描范围导致,根据LiVOX Mid-40参数中”130m@20% Reflectivity”建议用户将飞行高度设置为100~120m,飞行速度可根据数据需求设置。本测试中,我们分别选取了针阔叶样地的点云数据( 飞行高度100m,飞行速度4m/s),进行林业参数提取和分析。
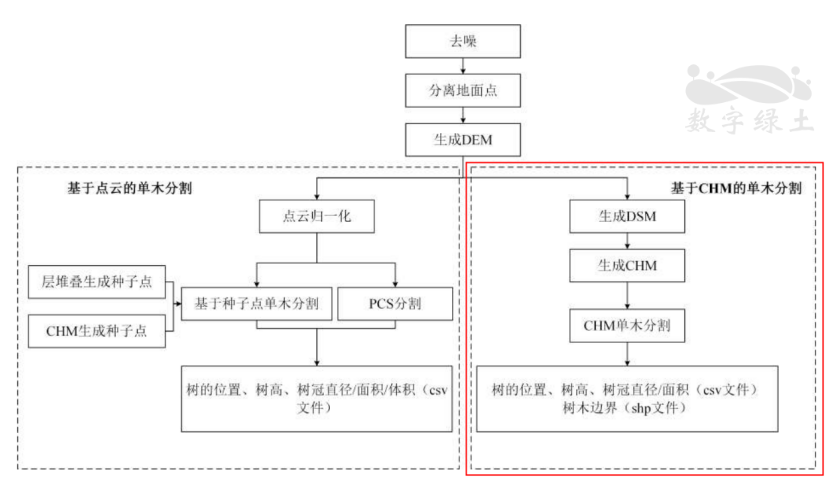
基于激光雷达点云数据获取单木参数,首先需要进行单木分割,目前,单木分割方法可分为基于CHM的分割和基于点云的分割。LiDAR360的机载林业模块分别提供了基于CHM和基于点云的单木分割算法。其中,基于点云的单木分割包括直接基于点云分割,以及基于种子点的单木分割。结合研究区域的植被类型,我们选择了基于种子点的单木分割方法,流程如图为利用LiDAR360进行CHM分割大致经过以下步骤:去噪、滤波、生成数字高程模型(Digital Elevation Model, DEM)、数字表面模型(Digital Surface Model, DSM)和冠层高度模型(Canopy Height Model, CHM)、基于CHM进行单木分割。利用LiDAR360进行点云分割大致经过以下步骤:去噪、滤波、生成DEM、点云归一化、基于点云的单木分割。
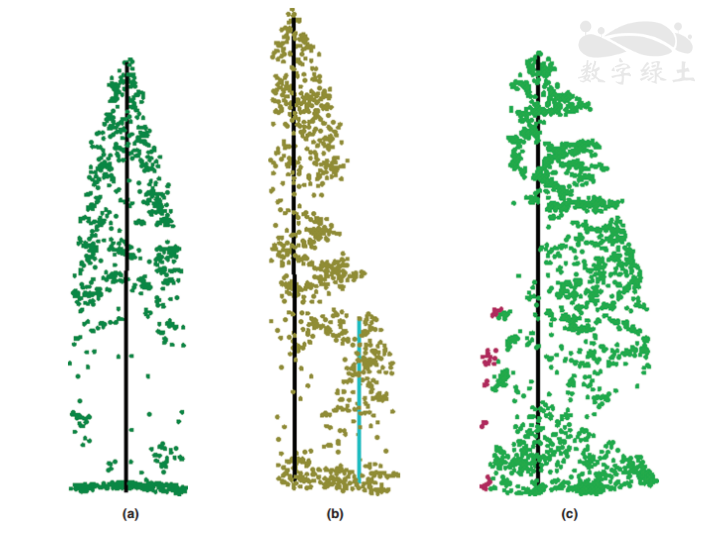
(a)树木被正确分割(True Positive, TP)
(b)树木未被检测(False Negative, FN)
(c)错误检测(False Positive, FP)
此次测试区域的针叶林样地树木共计38棵,阔叶林样地41棵,分割精度如下:
基于LiAir V的针阔叶林单木分割精度验证

针叶林的分割精度F值为0.71,其中正确分割21棵。阔叶林F值较低为0.36,正确分割9棵。根据植被类型和点云特征分析,此次测区内阔叶林木密度较大,且阔叶林自上而下分割不好确立树木顶点,因此误差值较大。当单木分割精度较差时,推荐通过ALS编辑(www.lidar360.com)工具对种子点进行增加、删除等操作,并基于编辑后的种子点再次对点云进行分割,提高分割准确性。
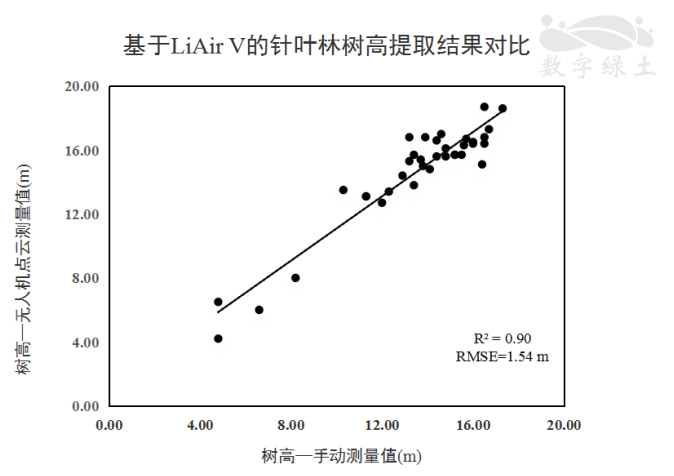
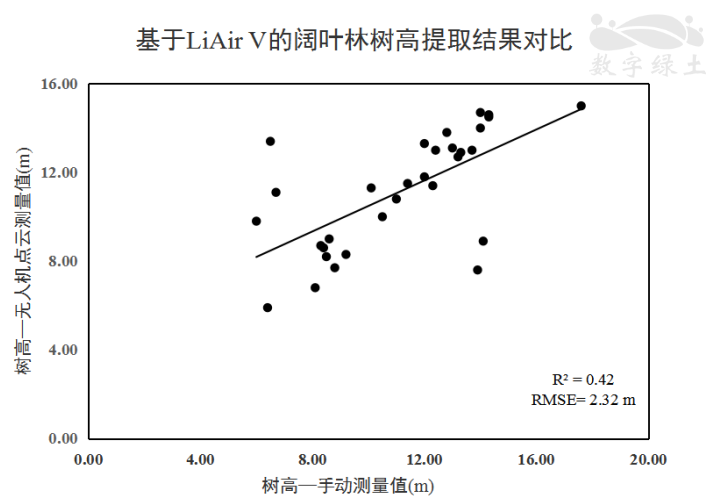

此次针对LiAirV的评测集中于林业应用,从性价比上考量,LiAirV仍可做为针叶林带的样地调查辅助手段,针对覆盖度,树高,单木数量以及冠幅等参数的提取精度和效率都能达到需求。阔叶林区应用则应根据用户需求,做好详尽地形勘察,航带规划以最大限度的确保数据质量。
目前客观看来,这款激光雷达系统中38.4°的视场角确实降低大面积数据获取的效率(为了让大家直观感受,这里引自知乎ziv.lin的一张图做说明),尤其是在面状地形测绘中。然而,科技的进步往往不能一蹴而就,就兼具高性价和目前的测量范围精度而言,LiAir V在林业,电力巡检(如下图)领域未来仍大有可为,当然,正如业内人士评价Mid-40所言“这是一款占尽了价格优势,却不以价格取胜的激光雷达。而是严肃地提出了激光雷达发展的一个新方向,引领时代潮流。”同样的,我们也希望我们的LiAir V以极高性价比让利用户,带给用户的不仅仅是价廉,而更多的是“物美”,提供给客户最优的解决方案。让我们一起拭目以待新技术带来的更大产业变革。
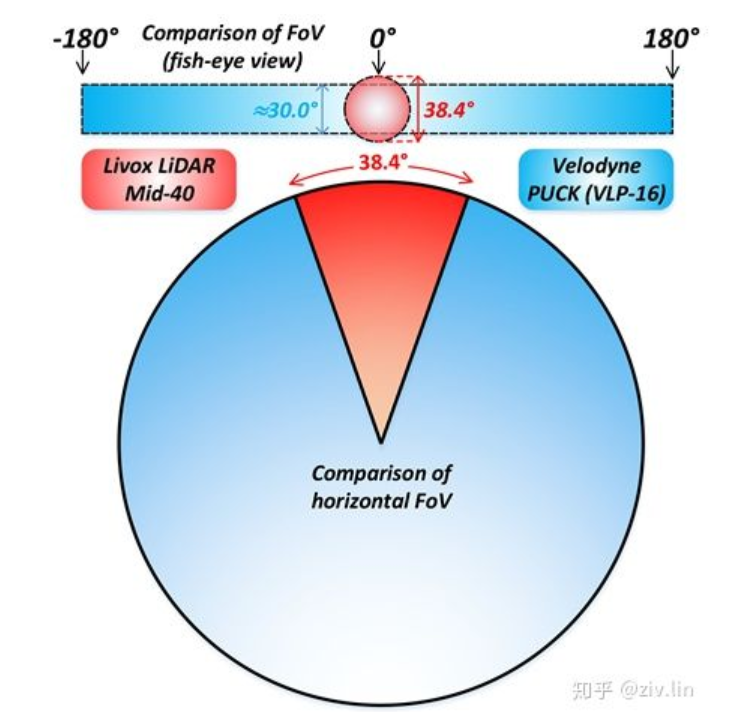
Livox Mid-40与velodyne 16线激光雷达视场角对比
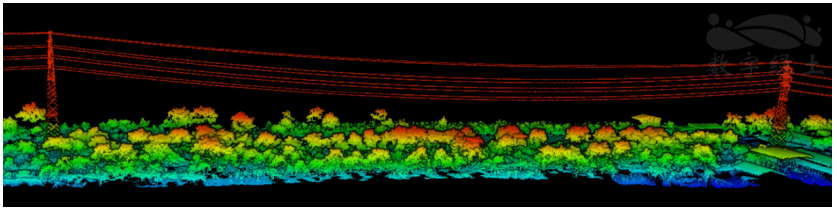
输电通道三维点云显示(按高程显示)