## 间隙率 ##
### 功能概述 ###
间隙率主要是指森林群落中老龄树死亡或者因为偶然因素导致成熟阶段优势树种死亡,从而在林冠层造成空隙的现象。
### 原理描述 ###
间隙率的计算,使用以下公式:
其中,nground是提取的Z值低于高度阈值的地面点数,n是总点数。值得注意的是:归一化的点云数据中所有低于高度阈值(该值常设置为2m)的点在间隙率的计算过程中都被视为地面点(Richardson et al.,2009)。
### 用法 ###
点击*机载林业 > 森林参数 > 间隙率*,生成间隙率。
### 参数设置 ###
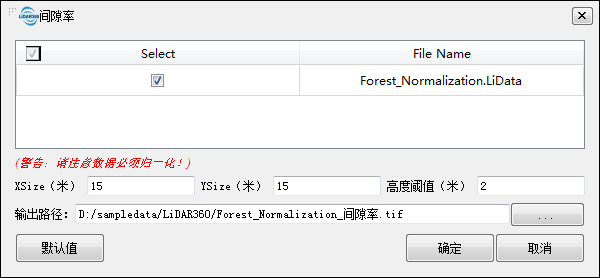
- **输入数据**:请确保每一个输入的点云数据都是[归一化](../DataManagement/PointCloudTools/Normalization.md)的数据;输入文件可以是单个点云数据文件,也可以是点云数据集;待处理数据必须在LiDAR360软件中打开。
- **XSize(米)(默认为“15”)**:栅格尺寸的长,该值应大于单木冠幅,对于大多数森林类型而言,栅格尺寸应大于15米。
- **YSize(米)(默认为“15”)**:栅格尺寸的宽,该值应大于单木冠幅,对于大多数森林类型而言,栅格尺寸应大于15米。
- **高度阈值(米)(默认为“2”)**:区分地面点和树木点的阈值,高度值小于高度阈值的点不参与计算,默认值是2m。
- **输出路径**:输出路径,运行后,每一个输入的点云数据文件都会生成一个对应的栅格文件(*.tif格式)。
- **默认值**:将XSize、YSize和高度阈值恢复为默认值。
> 注意:只有当软件中加载了点云数据时,才能使用间隙率功能,否则,软件会弹出“There is no point cloud data meet the conditions of calculation!”的提示信息。如果点云的最大Z值大于200或者最大Z减去最小Z大于200时,认为数据是没有归一化的,软件会弹出下图所示的提示信息,点击“YES”,这种类型的数据仍然参与运算,点击“NO”,这种类型的数据将不参与运算,用户可重新选择满足条件的数据。
>
>
>