
- 地形测绘:根据实际通行条件实现车载、机载立体采集,完成特定场景下测绘任务。
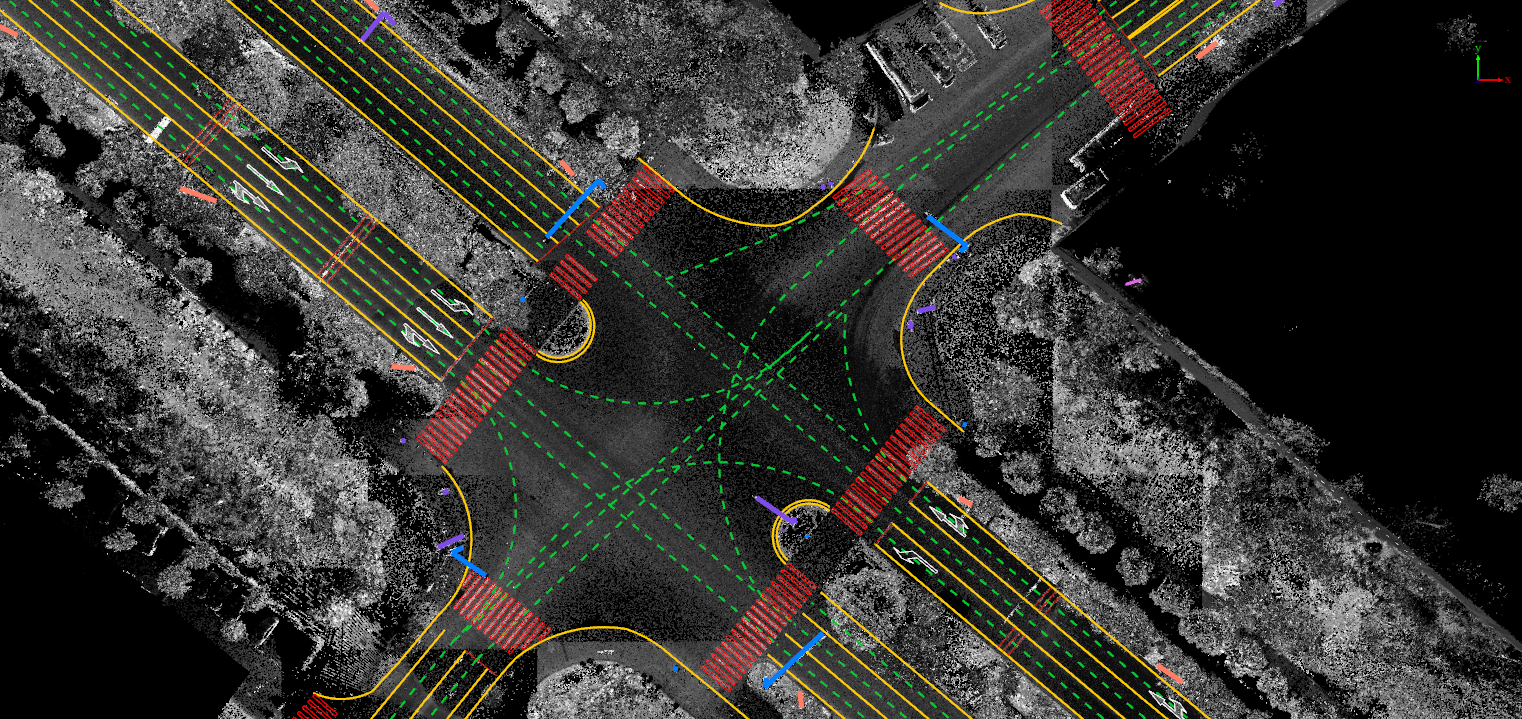
- 高精地图:使用车载模式和全景相机,结合点云数据和全景数据进行高精度地图制作。
- 数字城市:在车载模式下进行移动测量,获取街道和周边建筑的高精度彩色点云,提取关键要素,进行三维城市建模。
- 林业调查:可使用中、长测距激光雷达结合车载多平台套件采集林业数据,实现森林资源清查。
| 系统参数 | |||||
| 尺寸 (mm) | 265*270*230 | 电池 | 5700mAh*6 | 存储 | 512G SSD |
| 重量 ( 不含电池 ) | 4.7kg | 工作时间 | ≥6h(一组电池) | 端口 | HDMI,USB, 网口 |
| 适用环境 | 室内和室外 | 系统控制及数据显示 | 无线模式 | 手机 / 平板电脑通过连接设备的 WIFI,进行作业控制及数据同步显示 | |
| 处理器 | 四核八线程 | 有线模式 | 平板电脑通过数据线连接设备,进行数据传输与控制 | ||
| 相机参数 | |
| 相机类型 | 广角相机 |
| 像素 | 890W |
| 帧率 | ≥3 |
| 数据成果 | |
| 相对精度 | ≤3cm |
| 绝对精度 | ≤15cm |
| 点云格式 | las, laz, ply, LiData |
| 传感器参数 | |
| LiDAR传感器 | XT32 |
| LiDAR 精度 | ±1cm |
| 垂直视场角 | -16°~15° |
| 水平视场角 | 0°~360° |
| 测量范围 | 120m |
| GNSS 参数 | |
| 信号跟踪 | GPS: L1 C/A, L1C, L2C, L2P, L5 GLONASS: L1 C/A, L2C, L2P, L3,L5 BeiDou: B1,B2 |
| 预处理软件定位精度 | 1cm+1ppm |