
冠层高度是指森林冠层枝、叶离地面的垂直距离,是反映森林冠层结构形态的主要参数。激光雷达作为一种主动式遥感系统,具有低成本、高作业效率、可穿透植被区域并返回地面点回波等特性,激光雷达点云已被广泛用于提取各种森林参数,如树高、胸径、冠层体积、冠层高度等。
冠层高度模型(Canopy Height Model,CHM)是冠层尺度森林结构参数的主要数据源,通常CHM使用数字表面模型(DSM)减去数字高程模型(DEM)获得,这种方式可满足大部分地形场景的CHM生产要求。但对于陡峭地形,由于地形不连续,使用以上方式会导致地形断层处计算的冠层高度不准确,生成的结果会出现尖峰现象,无法满足生产要求。
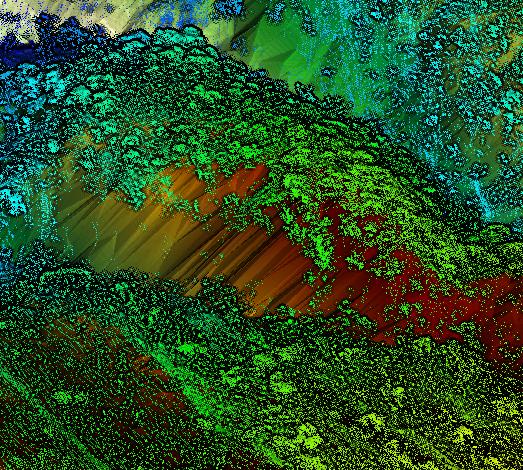
点云与TIN模型叠加显示(地形断层处1)
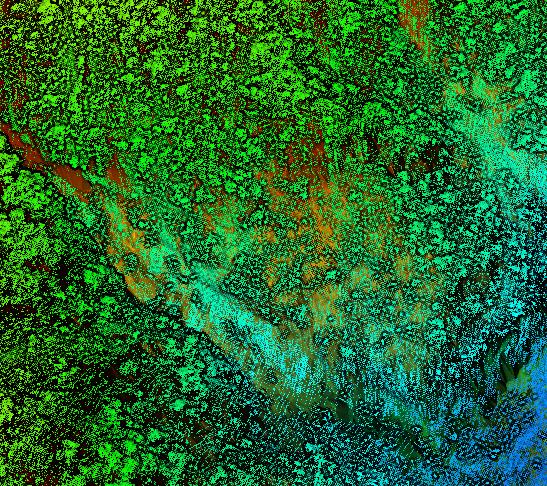
点云与TIN模型叠加显示(地形断层处2)
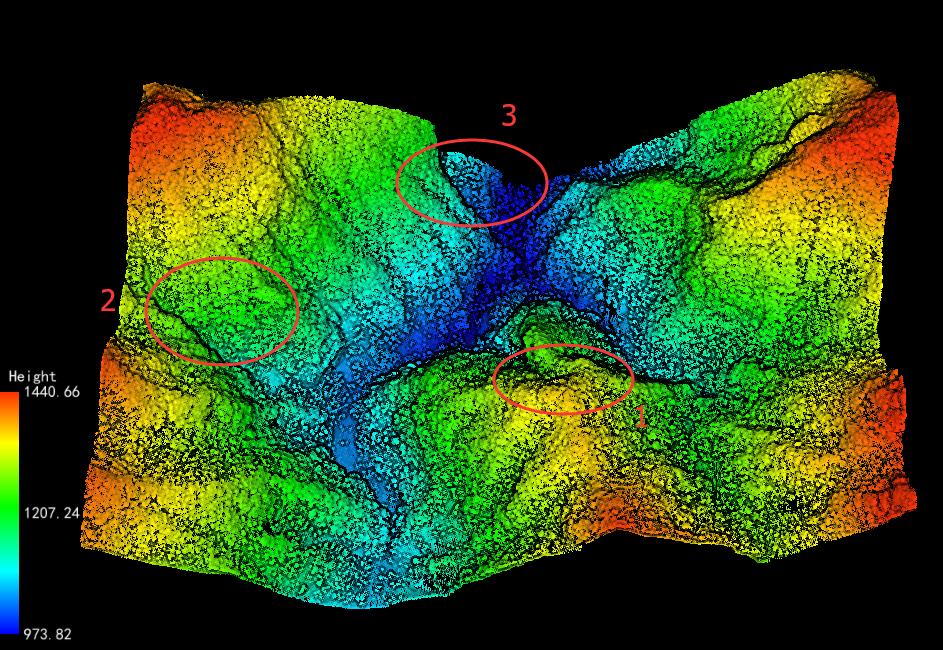
地形断层处尖峰现象
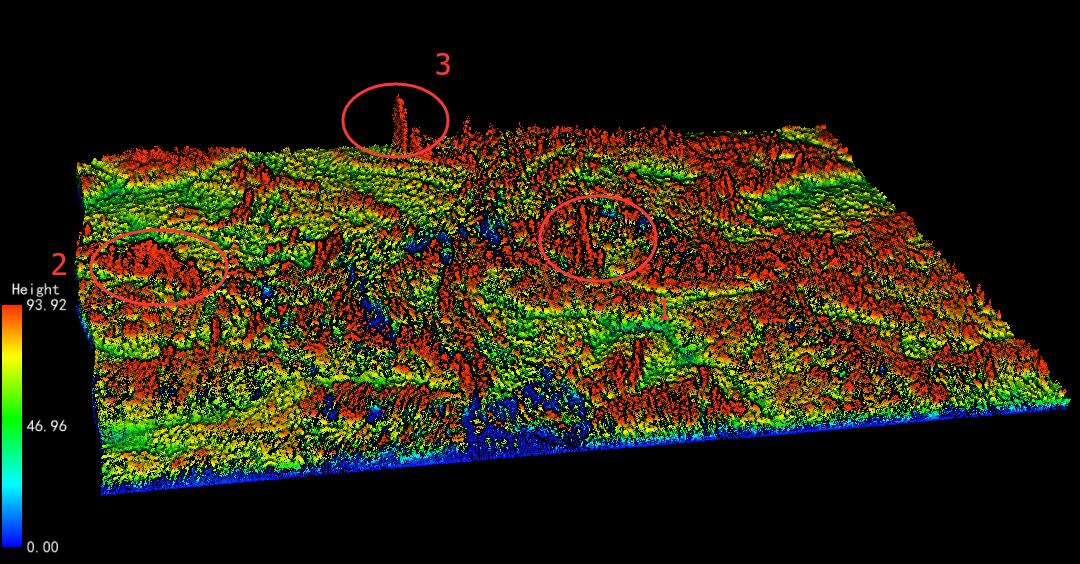
断层处去尖峰化
2、地面点分类:工具箱>分类>地面点分类。根据测区地形选择对应地形场景,分离出地面点及非地面点;
3、植被点分类:工具箱>分类>基于深度学习分类。勾选植被类别;
4、基于地面点归一化:工具箱>数据管理>点云工具>根据地面点归一化。对数据进行归一化处理,去除地形起伏对树木高度的影响;
5、生成CHM:工具箱>地形>DSM。使用归一化后的点云数据生成nDSM,初始类别选择植被类别。
以植被点云构建数字表面模型(nDSM),生成的nDSM即为CHM。相比传统的DSM与DEM作差构建CHM,该方法信息损失量小,模型精度更高。
注意:如果使用TIN差值方式,则选择无凹坑TIN方式生成DSM。