
(一份初始调查研究报告)
数字绿土国际部 (GVI) 于近期发表了一篇题为《电力线走廊地区制图——数据获取与处理的方法》的文章,文中向国际读者们展示了我们成熟且经过实地检验的技术解决方案——如何使用无人机激光雷达系统以及LiDAR360后处理软件完成电力线巡检。文章引起了巨大的反响,各种询问接踵而至。与其他所有业界一样,电力行业也一直在寻求方法,将新科技与新解决方案应用到工作中,并以此提高产量和效率。激光雷达以其出色的能力,包括它的速度、准确性、自动化处理、以及便于与其他地理信息数据整合等特点,已经成为了许多能源服务公司工具库中非常重要的一员。
上一篇文章向读者们展示了数字绿土用无人机载激光雷达进行高压输电线巡检的解决方案。现在,我们要来探讨另一个问题,如果用激光雷达去巡检分布在城市中的城市配电线路怎么样呢?由于管制等原因,在城市区域使用无人机系统要么是被严格禁止的,要么效率低下(美国相关规定要求无人机不能飞离自己的视线范围)。那如果我们用地面激光雷达雷达系统,再具体一点,用手持式的移动激光雷达系统呢?为了回答这个问题,我们做了一个快速的测试。这篇文章详述了我们做了什么,以及我们发现了什么。
我们必须强调,我们不是提供一个解决方案,而只是展现一些我们在测试中的一些发现。这有可能开发出激光雷达在城市电力线巡检中的一些潜能。我们在接下来的几周内将开展后续的测试,我们欢迎大家的各种提问,评价,以及建议。
实验地点

图1. 实验地点在谷歌地球上的俯瞰图

图2. 实验地点的街景照片
我们选择这片两个街区大小的地方作为我们的实验地点,它位于Allston Way与Spaulding Ave (SW)的交叉路口,到Addison St与Jefferson Ave (NE)的交叉路口。此处具有非常典型的城市区域布局特点。而我们选择这个地点的原因也非常简单,它就在我们位于伯克利市中心的办公室附近。
激光雷达系统

图片 3. GVI LiBackpack 50
这次实验中,我们选择了第二代单激光雷达背包LiBackpack 50。LiBackpack 50是我们目前销量最好的基于SLAM算法的移动激光雷达扫描产品。它独特的设计也使得该产品可以改为手持使用,以提供额外的便捷性。LiBackpack 50搭载了Velodyne VLP-16激光雷达传感器。
传感器的测量距离最大为100米,具有3厘米的精度以及2°的角度分辨率。在单反回模式下,VLP-16传感器每秒最多可以生成30万个三维点数据。基于我们SLAM算法的手持移动扫描设备的一大主要优势就在于,这个设备可以持续不断的生成三维点云数据,并将行走的轨迹,行走的闭环数,以及时间戳等信息显示在手持设备上。这使得用户不需要进行手动配准工作,自动生成工作环境的三维点云数据。
数据获取

图4. 测试扫描中的两个闭环路线图样
我们采用LiBackpack的手持模式,完成两个闭环的测量工作。大约使用了10分钟时间。操作者以相对较慢的速度走完了既定路线。完成之后,LiBackpack系统会生成三个输出文件:扫描所经过的路线(.xyz),原始数据(.bag),以及点云数据(.ply)。全部的三个文件都是可以直接进行后处理的。文件的总大小在2GB左右。
数据处理及结果
由于LiBackpack系统可以在扫描完成时即刻生成标准的点云数据,所以用户不需要再对原始数据进行任何转换。输出的点云数据即可使用。因为本次测试所使用的硬件设备不带有GPS模块,所以在绝对坐标系下的坐标是没有获取的。但如果有需要,通过地面控制点,可以非常容易的在LiDAR360软件中完成地理参考校正,以此获取绝对坐标。
注:LiDAR360是一款综合软件,可以提供高效的可视化,生成并管理激光雷达数据。点击此处可获取新用户30天免费试用。https://greenvalleyintl.com/software/software-downloads/

图5. 在LiDAR360中可视化显示测试中得到的点云数据
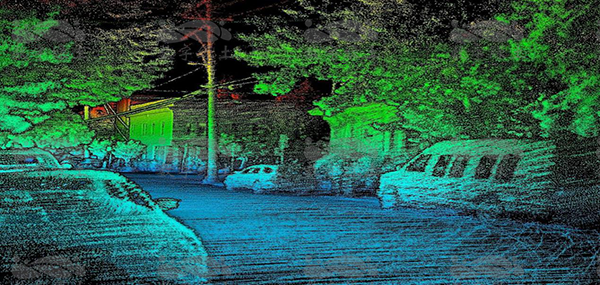
图6. 在LiDAR360中可视化显示测试中得到的点云数据
我们采用了LiDAR360软件中的机器学习分类对得到的地物进行了基本的分类,仅仅只对输电线和电线杆进行分类。在这次快速简单的测试中,我们没有将有线电视线和电话线从输电线中分离出来。
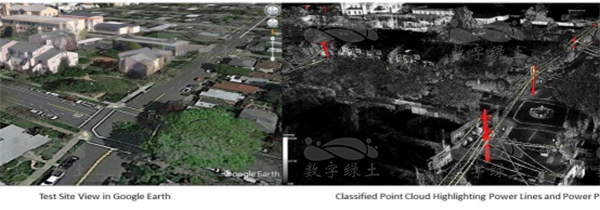
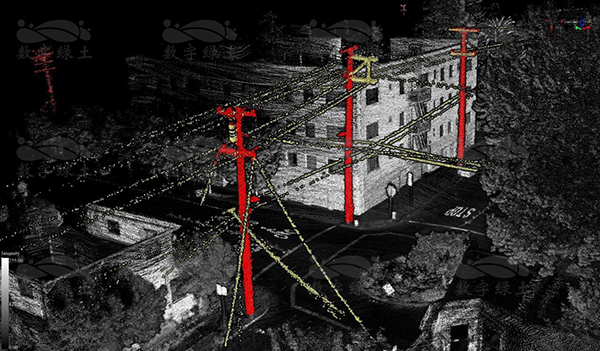
图8. 分类后的点云数据
发现及讨论
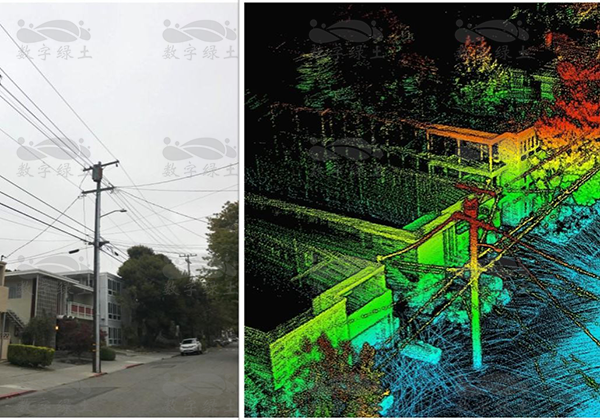
图9. 点云与街景照片
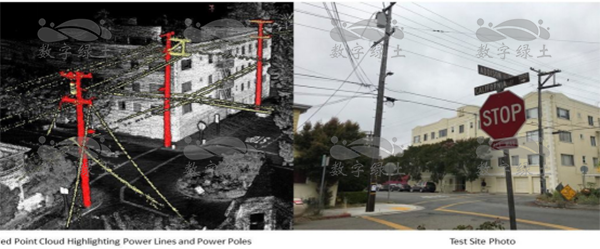
图10. 分类后的点云数据与街景照片
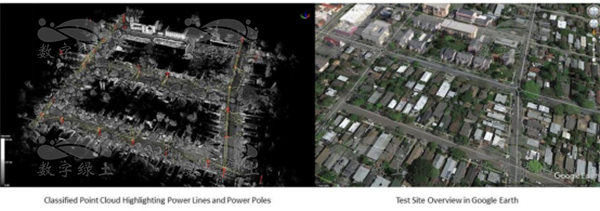
图11. 分类后的点云数据与谷歌地球中的景象
再一次重申,这次简单的测试只是为了发掘使用手持移动激光雷达扫描设备在城市电力线巡检中的潜力。使用数字绿土的LiBackpack手持式移动激光雷达扫描设备,是可以得到非常不错的数据的。正如这次测试所示,即使是使用VLP-16扫描仪,所得到的结果也已经出人意料的令人满意了。
通过LiDAR360中的机器学习分类器,从点云数据中提取关键信息是非常有可能的。但如果想要最佳的结果,我们仍然需要人工检视,并编辑分类结果。这一点,机器学习分类和其他自动分类并无区别。
关键地物分类完成之后,所得到的数据可以非常容易的并入标准工程数据,或是地理信息工作流程中去。与上一篇文章中提到的危险点检测一样,使用LiDAR360中的电力线模块中的工具,可以非常高效的进行危险点检测并给出报告。
诚然,Velodyne VLP-16有它的局限性。想要扫描某一个物体,必须保证激光雷达中发射的激光束可以达到物体表面。而该激光雷达传感器的有效测量高度是30~40米。
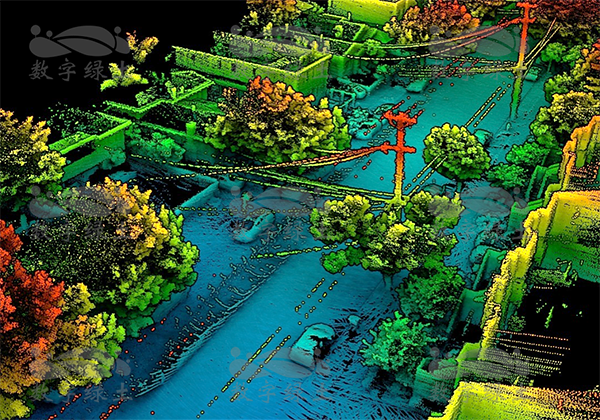
图12. 测试中用于表现配电线的点数据不充足时显示的图像
当我们意识到了硬件的这些局限性的时候,线路规划就显得尤为重要了。除了最基本的行走需要完成闭环线路之外,仪器的使用者必须确保需要扫描的地物可以被激光雷达的光束直接接触到。因此,LiBackpack所提供的手持模式,在这种情况下就非常重要了。同时,系统的SLAM算法的表现也必须非常精确且可靠。最近,数字绿土发布了全新的背包激光雷达系统LiBackpack D50,它拥有两个VLP-16激光雷达传感器,这使得使用背包系统长时间的在配电线路下直接扫描配电线路变得更加容易。D50的最大扫描高度提升至了70米,这为扫描更高的输电线路和电线杆提供了更好的解决方案。

图片 13. GVI LiBackpack D50