基于格网计算森林参数
功能概述
基于格网计算森林参数,将点云分成多个格子,计算每个格子的点云森林参数,可计算多种森林参数,包括高度变量、强度变量、郁闭度、叶面积指数以及间隙率。首先在x、y方向根据一定的距离将点云空间划分成不同的网格,然后根据选择的森林参数进行计算,每个网格都生成一条纪录,存储在CSV文件或一组TIFF文件中。
用法
点击机载林业 > 森林参数 > 基于格网计算森林参数,生成选择的森林参数。
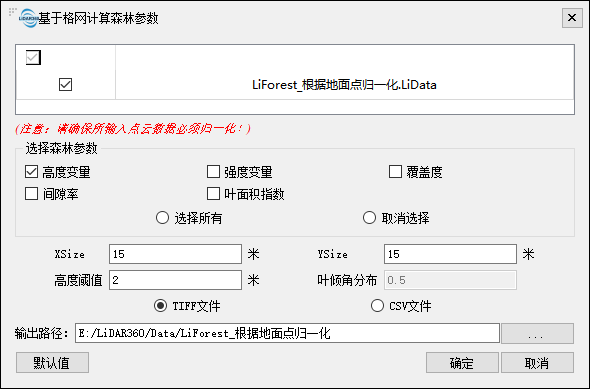
参数设置
- 输入数据:请确保每一个输入的点云数据都是归一化的数据;输入文件可以是单个点云数据文件,也可以是点云数据集;待处理数据必须在LiDAR360软件中打开。
- XSize、YSize(米)(默认为“15”):栅格尺寸的长,该值应大于单木冠幅,对于大多数森林类型而言,栅格尺寸应大于15米。
- 高度阈值(米)(默认为“2”):将点云分成不同层的阈值,高度超过该阈值的点才参与运算,默认值为2米。
- 叶倾角分布(默认为“0.5”):三维空间中叶片概率分布的一种数学表达式,与植被类型、叶倾角和波束方向相关。用户可以根据经验公式,并结合森林的实际情况确定叶倾角分布的值。已有研究表明叶倾角的椭圆分布可能适用于大部分森林的实际情况,值为0.5。
- 输出路径:输出路径,运行后,每一个输入的点云数据文件都会生成一个对应的CSV文件或一组TIFF文件,可以在回归分析中作为自变量。
- 默认值:将XSize、YSize、高度阈值和叶倾角分布恢复为默认值。
注意:只有当软件中加载了点云数据时,才能使用基于格网计算森林参数功能,否则,软件会弹出“There is no point cloud data meet the conditions of calculation!”的提示信息。如果点云的最大Z值大于200或者最大Z减去最小Z大于200时,认为数据是没有归一化的,软件会弹出下图所示的提示信息,点击“YES”,这种类型的数据仍然参与运算,点击“NO”,这种类型的数据将不参与运算,用户可重新选择满足条件的数据。