手动配准
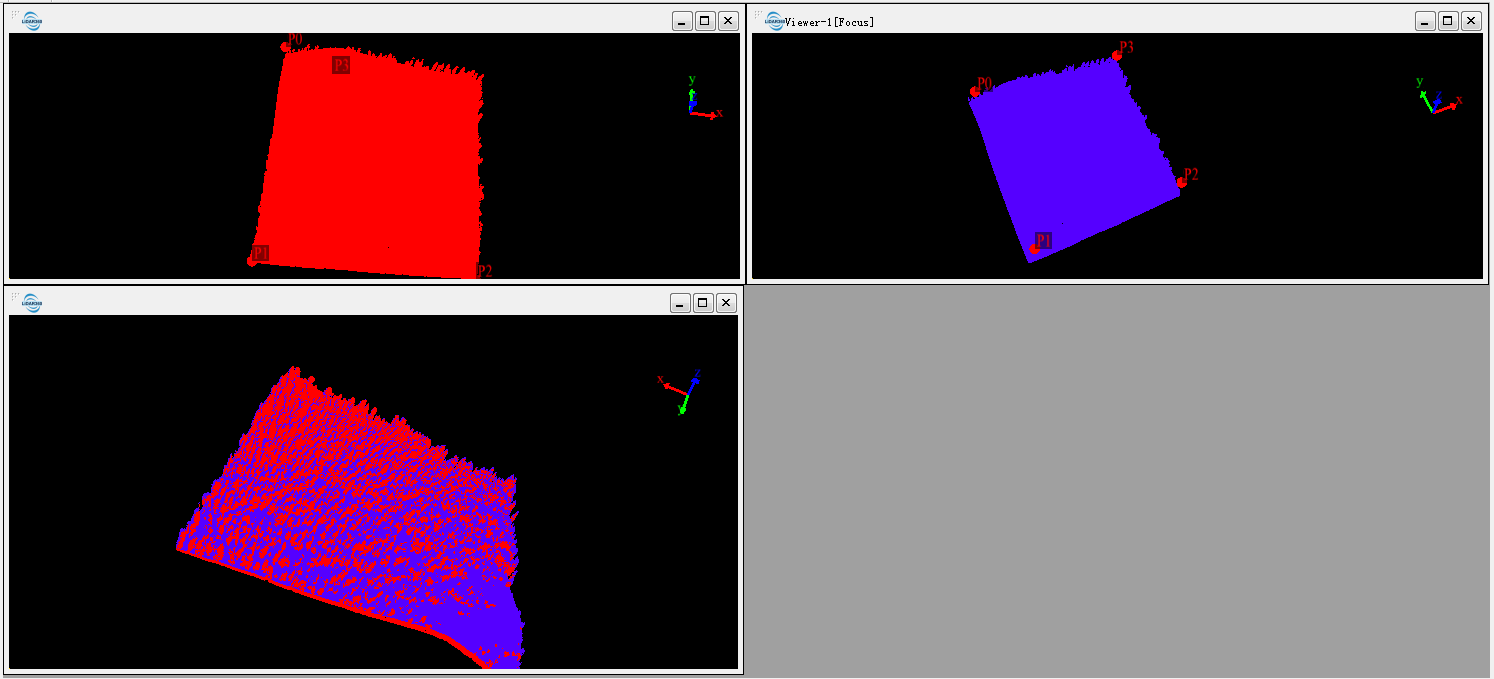
手动配准工具可用于点云、影像、模型数据之间的数据校正。将参考数据和待配准数据放在两个窗口中,在两个窗口中点选或拟合球(针对点云数据)得到至少三对同名点数据,通过同名点对计算两个数据之间坐标变换矩阵进行数据的坐标校正。通过点选点对,用户可在同名点对列表中查看数据之间的残差。

注意: 至少打开两个窗口(剖面窗口除外)才能激活该功能。
步骤
新建两个窗口,将参考数据和待配准数据分别放到两个窗口中。点击手动配准工具,弹出以下对话框窗口。

在弹出的对话框窗口中选择参考窗口和待配准窗口,点击确定按钮。弹出以下表格窗口,窗口列表中工具详细介绍见参数设置。

(可选)用户可点击打开数据从外部加载已知的同名点对,若如此,则可以跳过4、5、6步骤。
- 点击选择同名点或点选标靶球,在参考窗口和待配准窗口各选一个点作为同名点。
- 选择好一对同名点后,点击增加点对行数按钮,增加一个空行。
- 重复4、5步骤,选择至少三对同名点对。
- (可选)预测当列表中同名点对超过三对后,用户可勾选该工具在参考窗口中预测同名点对坐标。
- (可选)若用户不需要某一行同名点对参与坐标变换,有两种方式可满足要求:(1)在列表中将该行勾选掉;(2)可点击删除同名点对删除残差较大的点对。
- (可选)若某一对同名点对残差较大或想要修正该点对坐标,有两种方式可满足该要求:(1)用户可选中列表中该行同名点对,在参考窗口或待配准窗口中重新选择该点;(2)双击想要修改的坐标值进行直接修改。
- (可选)用户想要查看某一同名点对时,可双击列表中某行同名点对,该同名点对会跳转在窗口中居中显示。
- (可选)点击保存数据保存选择好的同名点对。
- 同名点对满足残差要求且不少于三对后, 点击数据变换将待配准窗口内的数据进行坐标变换,变换后生成新的数据。
工具栏

在表格窗口中,各个按钮从左到右依次为:保存数据、打开数据、转换参考窗口、增加点对行数、删除同名点对、点大小、预测、选择同名点、点选标靶球、R(拟合标靶球半径)、RMS(拟合标靶球残差)、数据变换。
点大小(默认为“20”):在窗口中所选择的点的大小。
预测(默认为“不勾选”):勾选该复选框并且同名点对超过三对后,在待配准窗口点选同名点后,则在参考窗口可预测对应点。
R:拟合标靶球的半径。拟合标靶球时,用户需要设置点云中标靶球半径大小。
RMS:拟合标靶球的均方根误差阈值,若点云质量较差时,可将该参数设置较大以免识别标靶球失败。
调整缩放(默认“不勾选”):若数据之间尺度不同,需要勾选此项。若不勾选,则认为点云之间为刚性变换,计算出的旋转矩阵中不含有缩放系数,反之则带有缩放系数。