按属性聚类
功能概述
该功能首先通过属性过滤以及类别过滤提取感兴趣的点云,然后利用欧式聚类将感兴趣的点云分割成若干聚簇,并对这些聚簇进行进一步筛选,最后统计这些聚簇的信息并输出统计报告。该功能不生成新的点云文件,但会将聚簇的标签写入到名为“Group”的点云的附加属性中(此附加属性为整型单分量,不可被定义为其它类型和分量数)。标签相同且大于0的点云视为同一聚簇,如1、2...;-1视为无效标签,表示该点不属于任意一个聚簇。用户可以通过按属性提取、按属性分类功能或按组提取、进一步处理感兴趣的点云。此功能将生成一个CSV格式的统计报告。该报告中的每一行都代表一个聚簇,聚簇的统计信息可由用户自由选择。
用法
点击数据管理 > 点云工具 > 按属性聚类
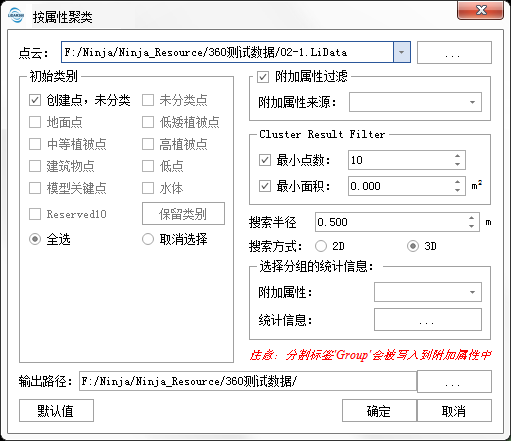
参数设置
- 输入点云数据:输入文件必须是单个LiData点云数据文件。用户可以选择已经在LiDAR360软件中打开的点云数据,也可以打开来自磁盘中的其它LiData文件。
- 初始类别:初始类别用于提取感兴趣的类别的点云。
- 附加属性以及范围选择:用于提取感兴趣的附加属性范围内的点云,可参考按附加属性提取。若不勾选则不进行此项过滤。
- 聚簇结果过滤:
- 最小点数(默认为“10”):若勾选此项则进行下述过滤:聚簇的点个数若小于此值,则该聚簇将被归为无效聚簇,标签置为-1。
- 最小面积(默认为“0”):若勾选此项则进行下述过滤:聚簇的投影面积若小于此值,则视为无效聚簇,标签置为-1。
- 搜索半径(默认为“0.5”):欧式聚类阈值。点云间欧式距离小于此阈值的点云将被分为同一聚簇。欧式距离的计算与搜索方法有关。此值越大,得到的聚类数量将会越小。
- 搜索方法:聚类过程中用于计算点云间欧氏距离的维度,目前支持2D和3D。当搜索方法为“2D”时,聚类时只考虑水平方向的欧式距离。
- 3D(默认项):欧氏距离的计算方式为:d =√(x0-x1)²+(y0-y1)²+(z0-z1)²。
- 2D:欧氏距离的计算方式为:d =√(x0-x1)²+(y0-y1)²。
- 统计附加属性(默认为勾选):若勾选此项,则在输出的csv报告中添加对某个附加属性的统计。
- 选择附加属性名称:选择附加属性的名称,可参考按附加属性提取。
- 选择统计信息:统计信息包含名称、凸包面积、点云数量、位置、AABB包围盒、最小值、最大值、平均值、标准差中选择一项或多项进行统计。其中名称、凸包面积、点云数量、位置、AABB包围盒是必选的。
- 默认值:将设置参数恢复为默认值。
- 输出路径:输出CSV统计报告的路径。