转换关系计算
功能概述
此功能基于控制点对计算出所需的转换关系,并可以将解算出的转换关系保存到历史文件中供再次使用。目前支持四参数和七参数的解算。
用法
点击数据管理 > 投影和坐标转换 > 转换关系计算
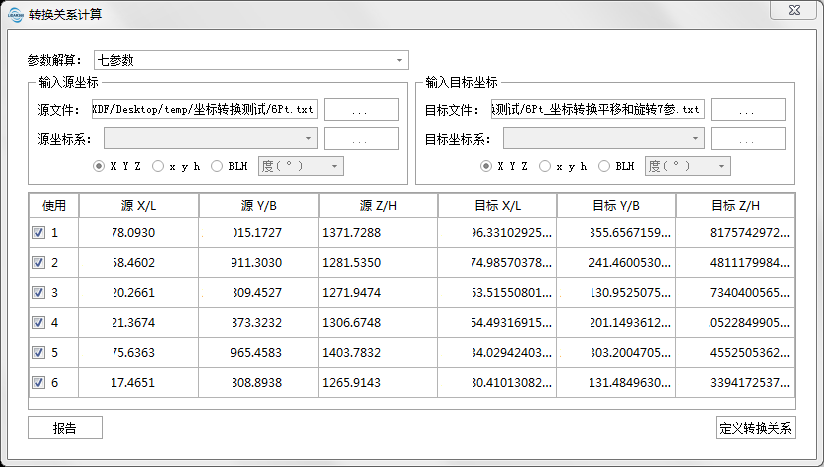
参数设置
- 参数解算:参数解算的的方法,支持四参数 和 七参数。
- 源/目标 坐标文件:输入控制点源坐标文件,格式可参考七参数解算控制点文件格式。
- 源/目标坐标系:当坐标形式选择了 x y h / BLH 时可以进行坐标系选择,可参考定义投影。
- 源/目标坐标形式:
- X Y Z(地心坐标系):输入的数据在投影坐标系或地心坐标系下时可选择此项,此时无法选择“源/目标坐标系”。直接计算源坐标与目标坐标之间的七参数变换。若用户选择了 四参数 则强制切换为 X Y Z。
- x y h / BLH:输入数据在投影/地理坐标系下时选择此项,此时需要选择“源/目标坐标系”。选择完成后将根据所选的坐标系自动进行一次切换。选择BLH时可以选择角度值的表示形式,目前支持“度”和“度:分:秒”。
- x y h: 将根据用户所选的投影坐标系将“源/目标坐标”投影到地理坐标,再根据投影坐标系中的椭球信息将地理坐标转到地心坐标系下,最后求解两地心坐标系之间的七参数。
- BLH: 用户需要选择“地理坐标系”,程序根据该地理坐标系中的椭球信息将该坐标转到地心坐标系下,最后求解两地心坐标系之间的七参数。
- 报告:解算转换关系并生成报告,报告中含有解算出的转换关系参数以及各个控制点的反投影误差。报告可以另存为HTML和ASCII格式。
- 定义转换关系:参考创建转换关系。
七参数解算
根据输入对应的三个及以上控制点对,利用布尔沙模型解算坐标系之间转换的七参数,即三个平移参数dx(米),dy(米),dz(米),三个旋转参数rx(秒),ry(秒),rz(秒)与一个缩放比例m(ppm),计算公式如下: 布尔莎七参数的公式可写为如下的形式:
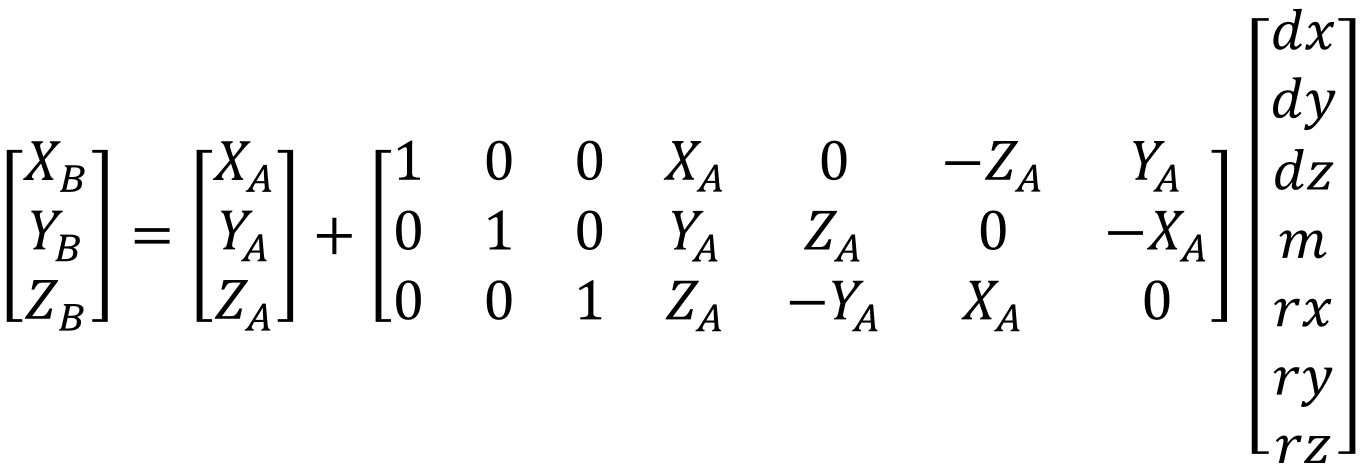
转换成方程式组,即:
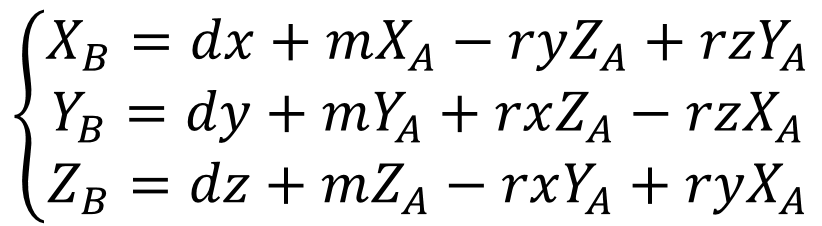
式中有七个未知量,如果有三组已知点,则按照上述形式可以构建9组方程,即可利用最小二乘法求得七个参数的值。七参数详细说明可参考参考创建转换关系。
四参数解算
根据输入对应的两个及以上控制点对,解算坐标系之间转换的四参数,包括两个平移参数dx,dy,一个旋转参数T,一个缩放比例K。四参数详细说明可参考参考创建转换关系。