点云分割
功能概述
点云分割算法通过分析点的高程值以及与其他点间的距离,以确定待分割的单木,获取单木位置、树高、冠幅直径、冠幅面积、冠幅体积等属性信息。
原理描述
Li等(Li et al.,2012)开发出一种点云分割算法,将单棵树木从点云中一株一株地分割开。算法原理如下图所示:
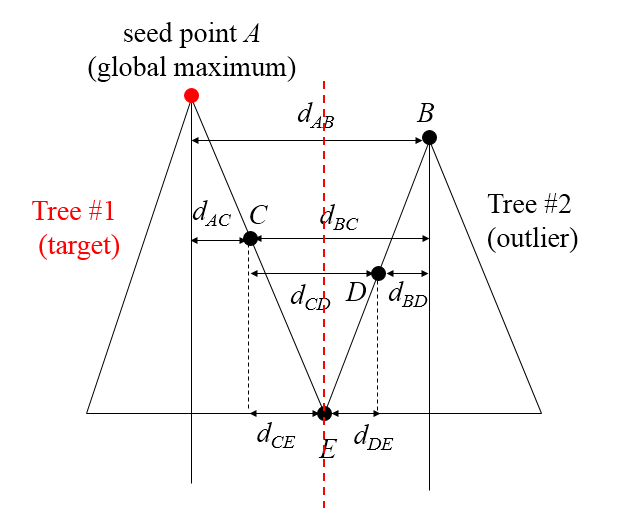
该算法从种子点A(即全局极大值)开始,主要根据间距临界值和最小间距规则,通过对更低的点进行估计,将种子点A发展为一个树聚类。例如,点A是最高点,因此将点A视作一号树木的树顶(目标)。此时把低于A的点相继进行分类。首先,点B被分类成二号树木,因为间距dAB大于一个设定的临界值(该参数由用户决定)。然后我们设置点C,点C的间距dAC小于临界值。通过与点A和点B的比较,点C的类别被设定为一号树木,因为dAC小于dBC。通过与点B和点C的比较,点D被分类成二号树木;通过与点C和点D的比较,点E被分类成二号树木。 临界值应当与冠层半径相等。当设置的临界值太大或太小时,会出现分割不足和过度分割的情况。
用法
要使用点云分割算法识别单木,点击机载林业 > 单木分割 >点云分割。
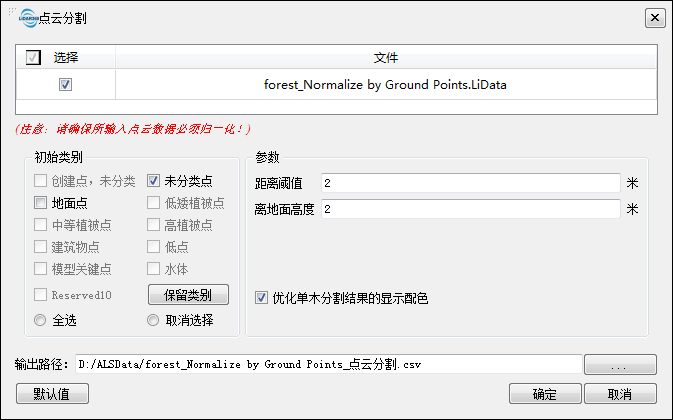
参数设置
- 输入数据:请确保每一个输入的点云数据都是归一化或根据地面点归一化的数据;输入文件可以是单个点云数据文件,也可以是点云数据集;待处理数据必须在LiDAR360软件中打开。
- 初始类别:参与点云分割的类别,默认选择点云数据含有的全类别。
- 格网大小(米)(默认为“0.6”):识别树木位置使用的格网分辨率参数,一般设置为平均冠幅直径的五分之一,该参数通常范围在0.3~0.6米。
- 缓冲区大小(pix)(默认为“50”):当待分割数据的长宽范围超过1500*格网大小时,会进行分块处理,该值是分块的缓冲区阈值,单位为像素数。可设置为待分割数据中最大冠幅直径除以栅格分辨率。
- 最小树高(米)(默认为“0”):分割单木的最小树高阈值,小于该值会被分割为单木。
- 离地面高度(米)(默认为“2”):低于阈值的点,被认为不是树的一部分,在分割过程中将被忽略。
- 高斯平滑:是否进行高斯平滑,一般而言,建议勾选高斯平滑选项,去除噪点影响。
- Sigma(默认为“1”):高斯平滑因子,该值越大,平滑程度越高,反之越低。平滑程度影响分割出的树木株数,如果出现欠分割,建议将该值调小(如:0.5),反之,如果出现过分割,建议将该值调大(如:1.5);除了高斯平滑因子,CHM分割结果还受CHM分辨率影响。要调整CHM分辨率,需调整DEM和DSM分辨率。
- 半径(pix)(默认为“5”):高斯平滑使用的窗口大小,该值为奇数;一般可设置为平均冠幅直径大小。
- 优化单木分割结果的显示配色(默认选中):通过重新排列单木分割后的ID信息,能够极大程度解决相邻树木赋同一颜色问题。
- 输出路径:输出路径,运行后,每个点云数据将生成对应的分割结果,分割结果是逗号分隔的CSV表格,其中包含树木ID、x、y坐标、树高、冠幅直径、冠幅面积和冠幅体积属性,可参考附录中的点云分割结果文件格式。
- 默认值:将距离阈值和离地面高度恢复为默认值。
注意:只有当软件中加载了点云数据时,才能使用该功能,否则,软件会弹出“There is no point cloud data meet the conditions of calculation!”的提示信息。如果点云的最大Z值大于200或者最大Z减去最小Z大于200时,认为数据是没有归一化的,软件会弹出提示信息,点击“YES”,这种类型的数据仍然参与运算,点击“NO”,这种类型的数据将不参与运算,用户可重新选择满足条件的数据。
@inproceedings{
author={ Li W K, Guo Q H, Jakubowski M K and Kelly M},
title={A new method for segmentation individual trees from the LiDAR point cloud},
booktitle={ Photogrammetric Engineering and Remote Sensing,78(1):75-84},
year={2012}
}