插值参数设置
生成地形产品时,需要设置一些栅格单元大小参数,并确定用于栅格单元计算的插值方法。参数设置分为常规和标准,在标准参数下会依照比例尺进行分幅
在标准参数下,分幅框及各对应范围示意图如下:
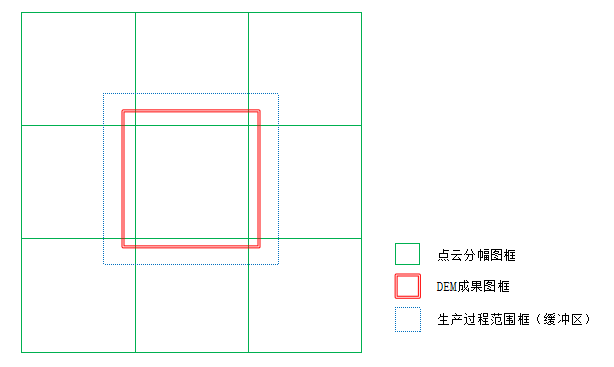
绿色框:标准分幅框范围;
红色双线框:成果范围框(外扩范围与比例尺M相关,为0.01/M(m),如比例尺1:500,外扩范围为5m),该范围根据比例尺内部计算;
蓝色点线框:为DEM生成过程中,成果范围框外扩缓冲区大小范围以保证相邻图幅重叠范围高程一致。
参数类型
- 常规:常规的数字高程模型参数配置。
- 标准:按标准数字高程模型生产参数配置。
栅格尺寸
通过XSize和YSize可设置栅格采样间隔(即分辨率),以米为单位,如果XSize和YSize的值分别设置为2,那么栅格单元大小则为2米×2米。
比例尺(仅标准模式参数下设置)
分幅比例尺。
缓冲区大小
- 缓冲区(像素)(默认为“5”):每个成果区域向四周延伸的大小,以格网为单位。
插值方法
LiDAR360提供了三种栅格单元插值的方法:反距离权重插值、克里金插值和不规则三角网插值。
反距离权重插值
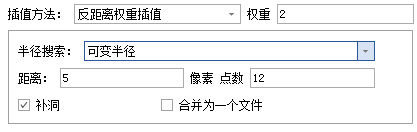
在反距离权重插值法中,使用附近点计算栅格单元的值,并通过点距栅格单元中心点的距离判断加权平均值。需要设置权重值。 半径搜索可用来定义各个栅格像元值插值的输入点,分为可变半径和固定半径。
权重(默认为“2”):采样点到像素中心距离的幂值,控制采样点高程对像素中心的影响程度。
可变半径:使用“可变”半径查找用于插值的指定数量的采样点。
- 距离(像素)(默认为“5”) :限制搜索邻近点的距离范围,默认为5个像素。
- 点数(默认为“12”) :插值时使用的最邻近点数,默认为12个点。
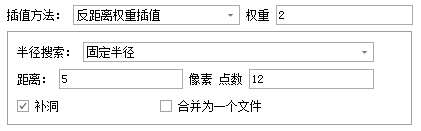
固定半径:使用固定半径范围内的所有点进行插值。
- 距离(像素)(默认为“5”) :该半径距离范围内的点用于插值,默认为5个像素。
- 点数(默认为“12”) :用于插值的最小点数,默认为12,如果在指定半径范围内没有找到所需的点数,则增加搜索距离,直到找到所需的最小点数。
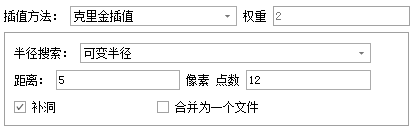
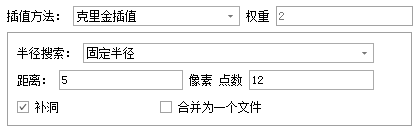
克里金插值
克里金插值法计算优化的协方差,并使用高斯过程插值栅格值。半径搜索可用来定义各个栅格像元值插值的输入点,分为可变半径和固定半径。
可变半径:使用“可变”半径查找用于插值的指定数量的采样点。
- 距离(像素)(默认为“5”) :限制搜索邻近点的距离范围,默认为5个像素。
- 点数(默认为“12”) :插值时使用的最邻近点数,默认为12个点。
固定半径:使用固定半径范围内的所有点进行插值。
- 距离(像素)(默认为“5”) :该半径距离范围内的点用于插值,默认为5个像素。
- 点数(默认为“12”) :用于插值的最小点数,默认为12,如果在指定半径范围内没有找到所需的点数,则增加搜索距离,直到找到所需的最小点数。
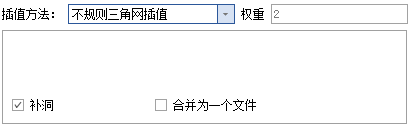
不规则三角网插值
从最近的邻近点组成的多个三角形共同形成的表面上提取栅格单元值,目前支持两种构网方式。
狄洛尼:使用传统的逐点插入法构建Delaunay三角网,所有点云全部参与构网。
无凹坑TIN:剔除高程异常的点云,可以生成不带有明显尖峰的三角网。
- 临界边长(默认值1.0米) :最终生成的三角网中的每一个三角形的每一条边在xy平面上的最短距离。每当新插入点的Z值降低插入缓冲区时,冻结当前三角网中所有三边长均小于临界边长的三角形。被冻结的三角形不再改变。此值越大,参与构网的点将会减少,生成的三角网更加平滑,丢失更多细节。反之,参与构网的点将会增加,细节更加丰富,更有可能出现尖峰。
- 插入缓冲区(默认值0.5米) :相邻两次冻结三角形时需要达到的高度落差。减小该值,则更多三角形被过早冻结,新点无法插入,尖峰现象减少,执行速度变快,遗失更多细节;反之,细节增加,构网结果将出现更多尖峰。
@inproceedings{
author={ Khosravipour A, Skidmore A K, Isenburg M},
title={Generating spike-free digital surface models using LiDAR raw point clouds: A new approach for forestry applications},
booktitle={ International journal of applied earth observation and geoinformation, 52: 104-114},
year={2016}
}
合并为一个文件
如果不勾选该选项,则每个点云数据都将被单独处理,最后生成多个栅格文件。勾选此选项将所有生成的栅格文件合并为一个文件。
补洞
如果栅格单元附近没有点,可能会导致栅格单元没有数据值。勾选这一选项后,可通过分析邻近栅格单元,并使用所选的插值方法计算出数据值,填入无值区域。
注意:补洞功能只针对闭合孔洞。