ICP点云配准
功能概述
通过设置基准点云与待配准点云,利用ICP(Iterative Closest Points)即迭代最近点算法对点云进行配准,基本算法过程如下。
假设给两个三维点集 X1 和 X2,ICP方法的配准步骤如下:
第一步,计算X2中的每一个点在X1 点集中的对应近点;
第二步,求得使上述对应点对平均距离最小的刚体变换,求得平移参数和旋转参数;
第三步,对X2使用上一步求得的平移和旋转参数,得到新的变换点集;
第四步,如果新的变换点集与参考点集满足两点集的平均距离小于某一给定阈值,则停止迭代计算,否则新的变换点集作为新的X2继续迭代,直到达到目标函数的要求。
用法
点击数据管理 > 投影和坐标转换 >ICP配准
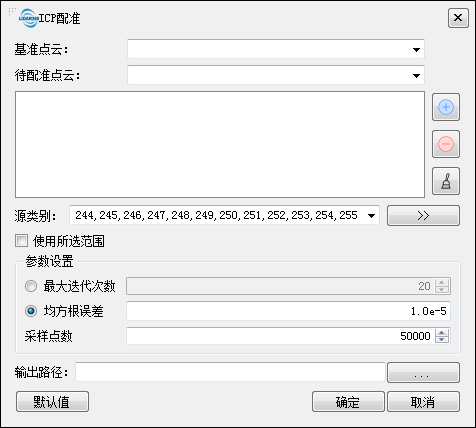
参数设置
- 基准点云:用于配准的基准点云,可直接从下拉框选取窗口内点云。
- 待配准点云:待配准点云,可选取一个或多个待配准点云进行配准,可通过下拉框选择待配准数据及右侧图标按钮进行点云的增加、删除或清空操作。
- 源类别:用于配准的点云类别,默认为全类别。
- 使用选择区域:可利用平台选择工具选中点云重叠区域,勾选此选项时即利用重叠区域进行配准,不勾选时即利用全局点云进行配准。建议勾选。
- 迭代次数(默认为“20”):两个点云配准时的进行迭代配准的次数。
- 均方根误差(默认选中,为1e-5):代表当前配准后的点云之间中误差差值。
- 采样点数(默认为“50000”):对大于该阈值的点云个数进行随机采样,使采样后用于配准的点云数量与该阈值相同。
- 输出路径:配准后的点云保存于该路径。