二次曲面滤波
功能概述
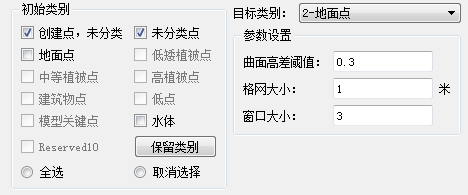
通过拟合二次曲面对地面点进行分类。具体思想为:首先对点云进行格网化,选取一定大小窗口内的格网最低点构建二次曲面,计算窗口内点云到拟合曲面的距离与设定的距离阈值进行比较,小于此阈值,则分类为地面点;反之,分类为非地面点。此方法适合有一定的地形起伏,但不甚陡峭的区域。相关界面参数如下图。
参数设置
- 初始类别:待分类类别 。
- 目标类别:分类目标类别。
- 曲面高差阈值(米)(默认为“0.3”):指在利用格网低点拟合曲面之后,计算当前待分类点与曲面之间的高差,当高差大于此阈值时,将当前点分类为非地面点,反之,分类为地面点。
- 格网大小(米)(默认为“1”):对点云进行格网化的格网边长大小。格网尺寸设置的越小,所拟合出的地面越细腻,所表现的细节越多,同时也会相对影响滤波效率。
- 窗口大小(默认为“3”):本功能采用移动窗口进行拟合曲面,因此窗口大小直接影响最后滤波结果。窗口设置的越大,每次拟合曲面的区域也越大;相反,则越小。窗口大小与格网大小应配合调整,可得到需要滤波效果。