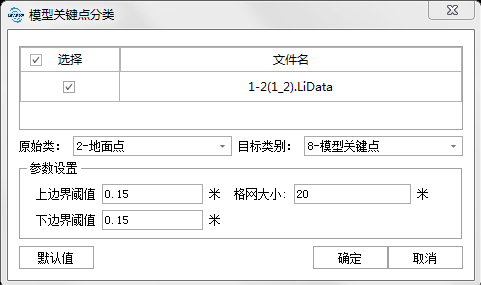
模型关键点分类
功能概述
模型关键点分类是对分类后的点进行一定程度的抽稀。 一般用于从地面点类别中抽取点生成一个保留地表模型关键点的稀疏点集,保留地形上的关键点而相对抽稀平缓地面区域的点。
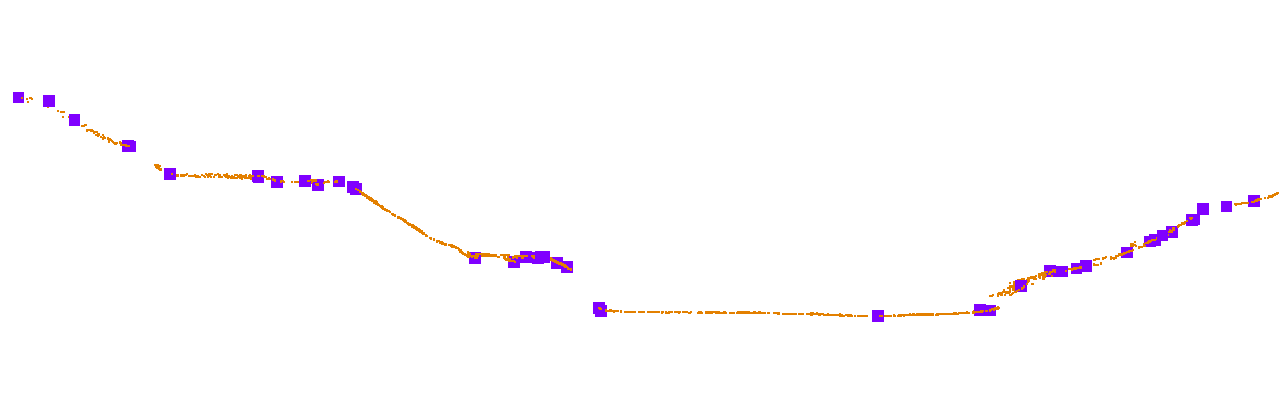
此功能的算法思路为首先对点云进行格网化,然后利用格网内的种子点建立初始的三角网。根据上下边界阈值将符合条件的点加入三角网中,不断进行迭代,直至所有的模型关键点都被分类完成。在下图中,黄色点为地面点,紫色点为模型关键点。
用法
点击分类 > 模型关键点分类。
参数设置
- 输入数据:输入文件可以是单个点云数据文件,也可以是点云数据集;待处理数据必须在LiDAR360软件中打开。
- 原始类:待分类类别。
- 目标类别:分类目标类别。
- 上边界阈值(米)(默认为“0.15”):由原始点所组成的三角网模型上所允许的最大高程容差值,超过该阈值则作为关键点,简单来讲,此值设置越大,提取的模型关键点越稀疏,反之,越密。
- 下边界阈值(米)(默认为“0.15”):由原始点所组成的三角网模型下所允许的最大高程容差值,超过该阈值则作为关键点,简单来讲,此值设置越大,提取的模型关键点越稀疏,反之,越密。
- 格网大小(米)(默认为“20”):设置该值以保证提取的模型关键点的密度,例如,想要保证每隔20米边长的格网内至少有一个点,则此值设置为20。
- 默认值:点击此按钮,恢复所有参数默认值。