查询倾角和走向
功能概述
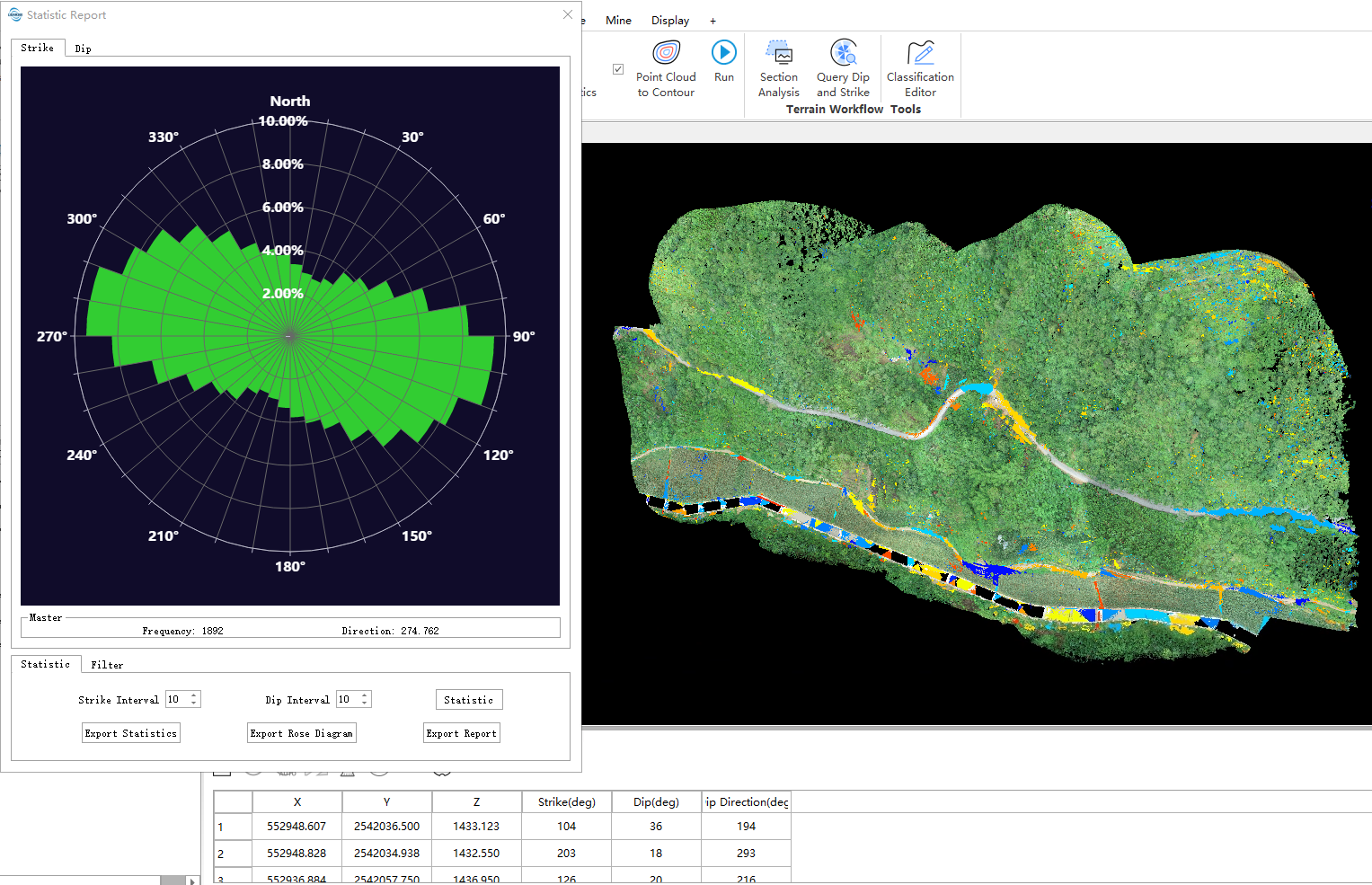
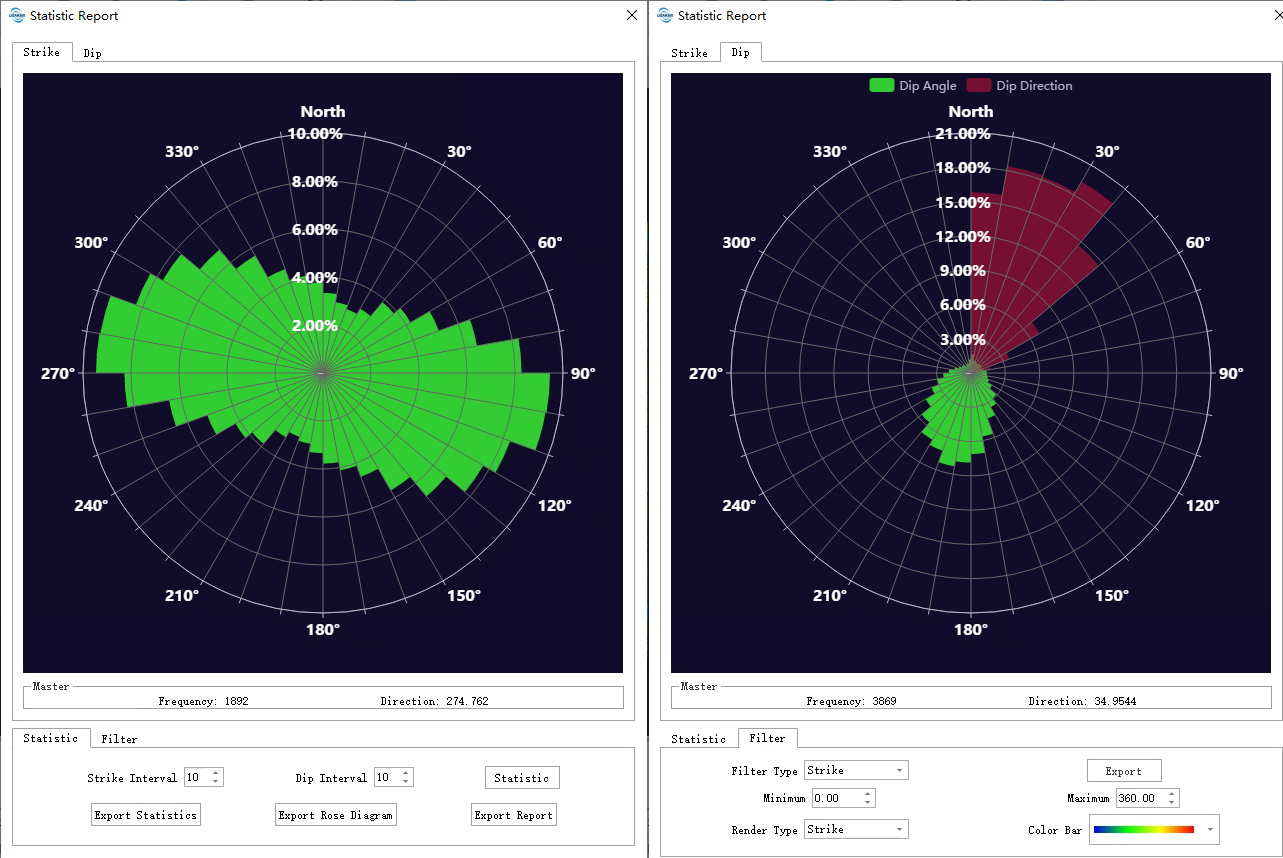
可通过自动或手动选取点云计算对应的倾角和走向,并提供对提取后结果的统计分析工具及相应的导出结果报告。
用法
将要编辑的点云数据加载到窗口中,并以该窗口为激活窗口。
点击 地质分析 > 查询倾角和走向 ,当前激活窗口将出现相应工具栏。
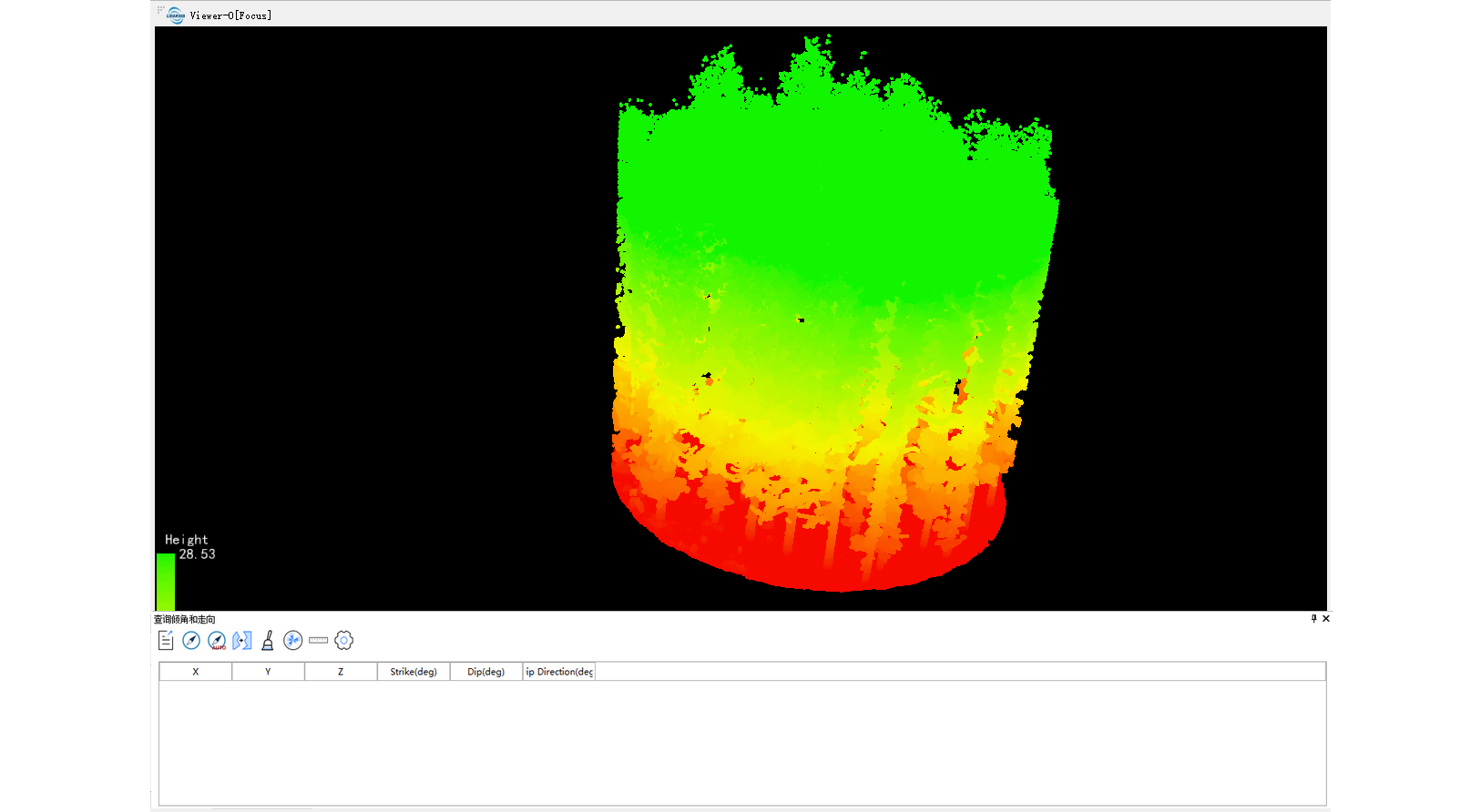

在表格窗口中,各个按钮从左到右依次为:输出数据、查询倾角和走向、自动查询倾角和走向、清除数据、统计和输出报告、长度量测及设置。
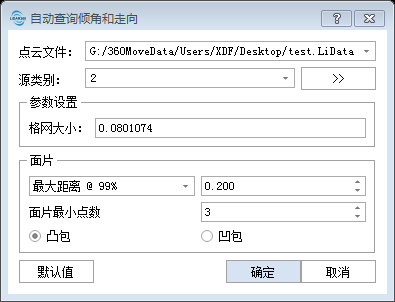
- 点云文件:通过下拉框选择用于自动提取倾角与走向的点云文件。
- 源类别:选择用于计算的点云类别,默认为地面点类别。
- 格网大小:对分割的结果具体表现在:此值设置的越大,查询的面片越细碎,反之面片越大。
- 面片:分割面片的相关参数。
- 类型选择:分割距离参数类型。
- 最大均方根误差:分割中簇的点云与拟合平面距离的最大均方根。
- 最大距离@68%:分割中簇的点云与所拟合平面的距离中前68%的最大距离。
- 最大距离@95%:分割中簇的点云与所拟合平面的距离中前95%的最大距离。
- 最大距离@99%(默认):分割中簇的点云与所拟合平面的距离中前99%的最大距离。
- 最大距离: 分割中簇的点云与所拟合平面的最大距离。
- 距离阈值: 距离阈值设置越大,点聚簇分割形成一个面片的阈值越宽松,相对来说形成大面片数量越多(分割成一个面片的点越多),反之越小,阈值越严格。
- 面片最小点数:即分割成一个面片最少需要的点个数。此值设置越大,相对大面片的数量越多,反之越少。
- 凸包:以凸包作为所生成的每一片结构面的形状。
- 凹包:以凹包作为所生成的每一片结构面的形状。
- 类型选择:分割距离参数类型。