生成TIN
功能概述
基于点云生成不规则三角网模型,LiDAR360采用自定义三角网模型文件格式*.LiTin。
用法
点击地形 > 生成TIN。

参数设置
- 输入数据:输入文件可以是单个点云数据文件,也可以是点云数据集;待处理数据必须在LiDAR360软件中打开。
- 源类别:参与生成三角网的点云类别。
- 构网方法:生成的TIN的方法,目前支持狄洛尼三角网模型和无凹坑TIN两种方法。
- 狄洛尼:使用逐点插入法构建狄洛尼三角网。
- 最大三角形边长(默认值 30 米):约束三角网中三角形边长,删除任意边长超过该值的三角形。
- 无凹坑TIN:剔除高程异常的点云,可以生成不带有明显尖峰的三角网。
- 临界边长(默认值 1.0 米) :最终生成的三角网中的每一个三角形的每一条边在xy平面上的最短距离。每当新插入点的Z值降低某一高度(插入缓冲区)时,冻结当前三角网中所有三边长均小于临界边长的三角形。被冻结的三角形不再改变。此值越大,参与构网的点将会减少,生成的三角网更加平滑,丢失更多细节。反之,参与构网的点将会增加,细节更加丰富,更有可能出现尖峰。
- 插入缓冲区(默认值 0.5 米) :相邻两次冻结三角形时需要达到的高度落差。减小该值,则更多三角形被过早冻结,新点无法插入,尖峰现象减少,执行速度变快,遗失更多细节;反之,细节增加,构网结果将出现更多尖峰。
- 分块:生成结果包括三种分块方式:按比例尺分块、按宽度和高度分块、不分块。
- 按比例尺分块(默认):以一定比例尺分块生成TIN。
- 比例尺:点云分块比例尺。
- 1:500(默认):1:500比例尺
- 1:1000:1:1000比例尺
- 1:2000:1:2000比例尺
- 1:5000:1:5000比例尺
- 缓冲区大小(米)(默认为“10”):两相邻分块之间的重叠大小。
- 比例尺:点云分块比例尺。
- 按宽度和高度分块:以一定的宽度和高度分块生成TIN。
- 宽度(米)(默认为“100”):点云分块宽度。
- 高度(米)(默认为“100”):点云分块高度。
- 缓冲区大小(米)(默认为“10”):两相邻分块之间的重叠大小。
- 不分块:点云整体生成TIN,不进行分块。
- 按比例尺分块(默认):以一定比例尺分块生成TIN。
- 置平区域(可选):置平工具用于根据用户输入文件对指定范围进行置平操作。
- 输入文件:多边形类型的shp文件,根据输入的shp文件范围和Z属性对不规则三角网进行置平。
- Z属性:置平的高程值。
- 导入地形特征(可选):导入地形特征(断裂线、模拟地形点)组件文件,断裂线及模拟的地形点将参与TIN生成。
- 输出路径:保存生成TIN模型LiTin文件的路径。
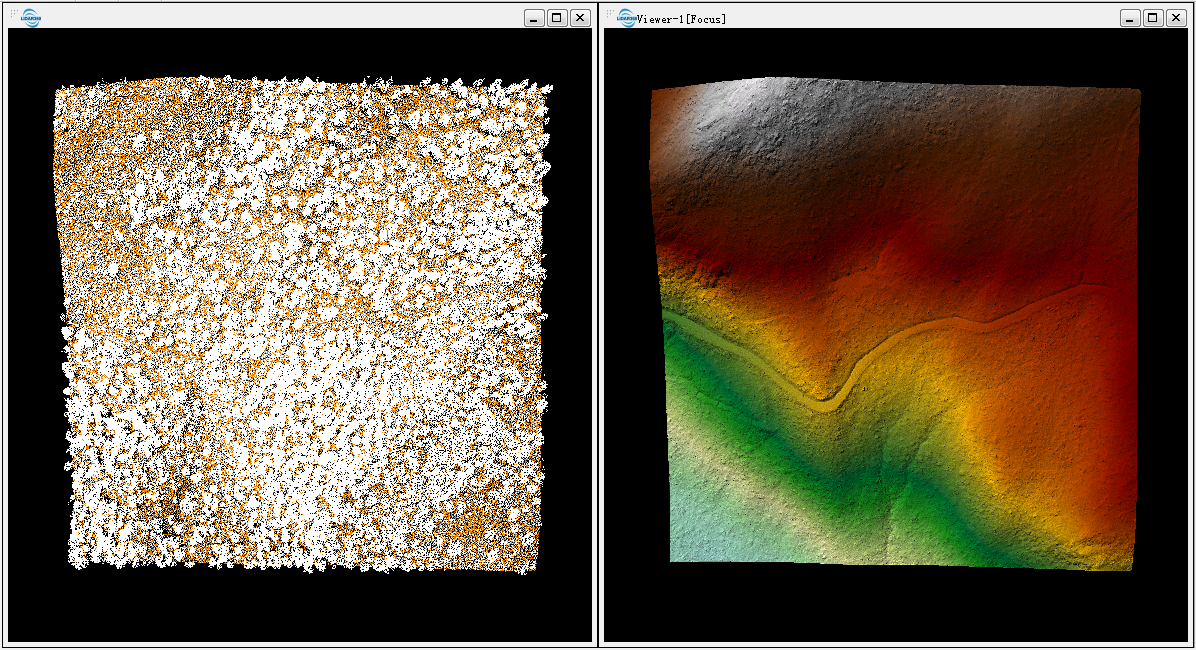
点云数据(下图左)和TIN模型(下图右)
@inproceedings{
author={ Khosravipour A, Skidmore A K, Isenburg M},
title={Khosravipour A, Skidmore A K, Isenburg M. Generating spike-f ree digital surface models using LiDAR raw point clouds: A new approach for forestry applications},
booktitle={ International journal of applied earth observation and geoinformation, 52: 104-114},
year={2016}
}