机载激光雷达点云单木分割
概述
森林资源调查对于及时掌握森林资源信息至关重要,森林资源调查的重要内容之一是测量样方内单木的树种、位置、树高、胸径等。基于激光雷达点云数据获取单木参数,首先需要进行单木分割,目前,单木分割方法可分为基于CHM的分割和基于点云的分割。LiDAR360的机载林业模块分别提供了基于CHM和基于点云的单木分割算法。其中,基于点云的单木分割包括直接基于点云分割,以及基于种子点的单木分割。
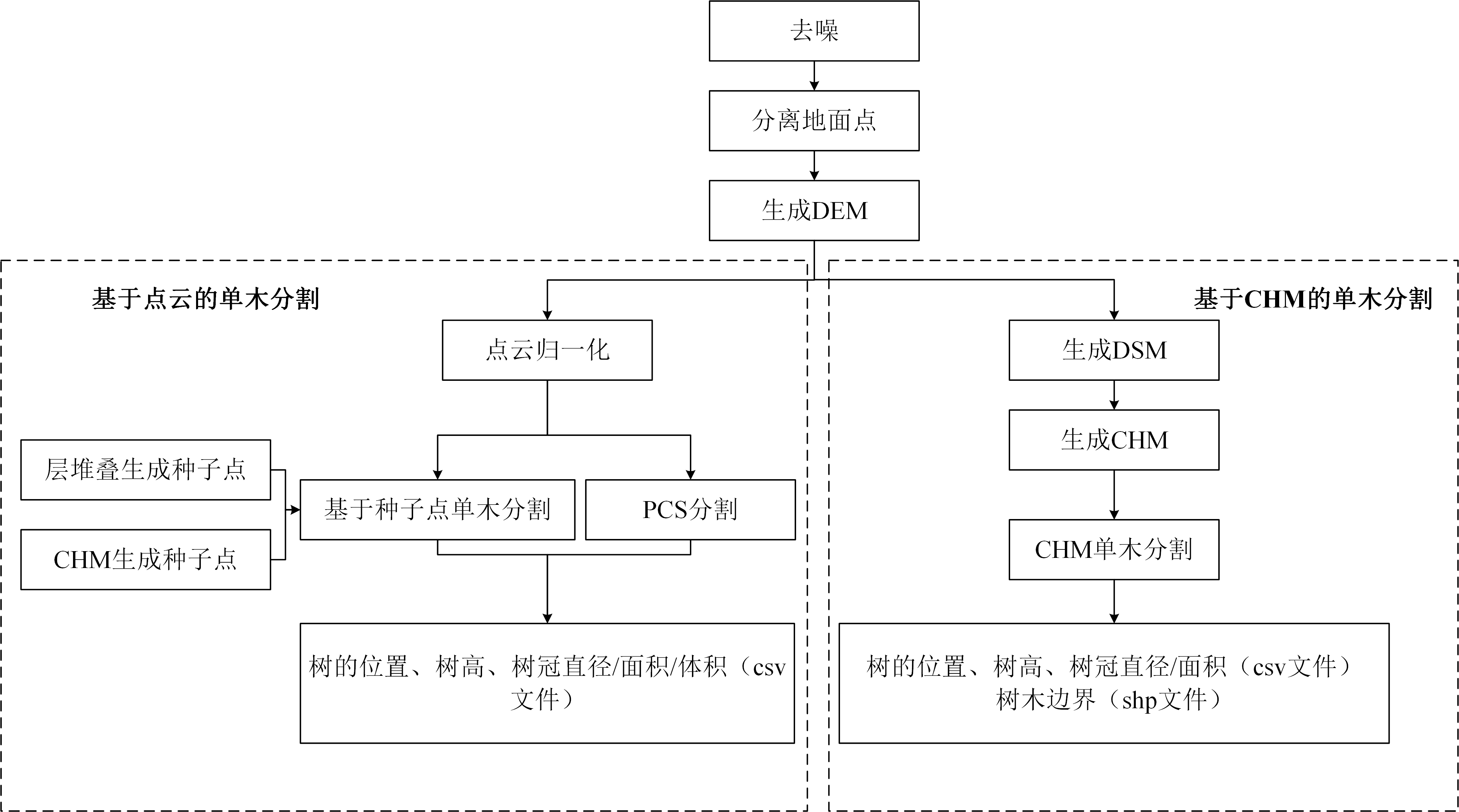
利用LiDAR360进行CHM分割大致经过以下步骤:去噪、滤波、生成数字高程模型(Digital Elevation Model, DEM)、数字表面模型(Digital Surface Model, DSM)和冠层高度模型(Canopy Height Model, CHM)、基于CHM进行单木分割。利用LiDAR360进行点云分割大致经过以下步骤:去噪、滤波、生成DEM、点云归一化、基于点云的单木分割。
数据准备
基于CHM的单木分割输入数据为CHM,生成CHM的步骤如下:
点击数据管理 > 点云工具 > 去噪,对点云数据进行去噪处理,去除噪点影响。
点击分类 > 地面点分类,从点云中分离地面点,用于生成DEM。
点击地形 > 数字高程模型,基于地点面生成数字高程模型。
点击地形 > 数字表面模型,生成数字表面模型。
点击地形 > 冠层高度模型,生成冠层高度模型。
基于点云的单木分割输入数据为归一化的点云数据,生成归一化点云的步骤如下:
点击数据管理 > 点云工具 > 去噪,对点云数据进行去噪处理,去除噪点影响。
点击分类 > 地面点分类,从点云中分离地面点,用于生成DEM。
点击地形 > 数字高程模型,基于地点面生成数字高程模型。
点击数据管理 > 点云工具 > 归一化,生成归一化的点云数据。
处理步骤
CHM单木分割步骤如下:
- 将CHM数据导入至LiDAR360软件中,点击机载林业 > 单木分割 > CHM分割,进行CHM分割,获取单木位置、树高、冠幅直径和冠幅面积,以及单木边界。
基于点云的单木分割步骤如下:
- 点击机载林业 > 单木分割 > 点云分割,进行点云分割,获取单木位置、树高、冠幅直径、冠幅面积和冠幅体积。
LiDAR360中生成种子点的方法包括基于CHM生成种子点和层堆叠生成种子点。
基于CHM生成种子点的步骤如下:
- 点击机载林业 > 单木分割 > CHM生成种子点,基于CHM数据生成种子点。
层堆叠生成种子点的步骤如下:
- 点击机载林业 > 单木分割 > 层堆叠生成种子点,利用层堆叠算法生成种子点。
基于种子点的单木分割步骤如下:
- 点击机载林业 > 单木分割 > 基于种子点分割,利用CHM或者层堆叠生成的种子点对点云进行分割。
CHM分割批处理步骤:
- 将待处理的点云数据导入至LiDAR360软件中,点击机载林业 > 批处理 > CHM分割批处理,对导入的点云数据进行去噪、分离地面点、数字表面模型、数字高程模型、冠层高度模型和CHM分割的流程化处理。
点云分割批处理步骤:
- 将待处理的点云数据导入至LiDAR360软件中,点击机载林业 > 批处理 > 点云分割批处理,对导入的点云数据进行去噪、分离地面点、数字高程模型、归一化和单木分割的流程化处理。
CHM分割结果的查看方式请参考查看CHM分割结果,点云分割和基于种子点的单木分割的查看方式请参考查看点云分割结果。
精度评估
单木分割精度评估可参考Li等人(Li et al.,2012)的文章,通过与实测值比较,分别记录分割得到的树木总数、正确分割的棵数、错误分割的棵数、漏分的棵数,按照下面的公式分别计算recall(r)、precision(p)和F-score(F)的值。Recall表示树木的检测率,precision表示树分割的正确率,F-score为综合考虑错分和漏分的总体精度,三者的变化范围均在0-1之间。
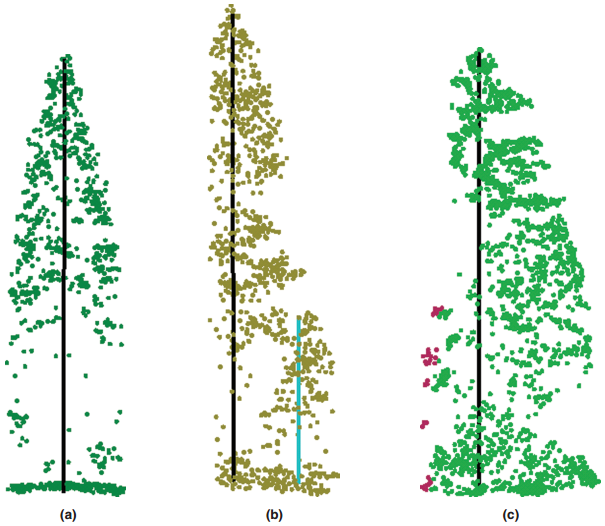
(a)树木被正确分割(True Positive, TP)(b)树木未被检测(False Negative, FN) (c)错误检测(False Positive, FP)
当单木分割精度较差时,可以通过ALS编辑工具对种子点进行增加、删除等操作,并基于编辑后的种子点再次对点云进行分割,提高分割准确性。
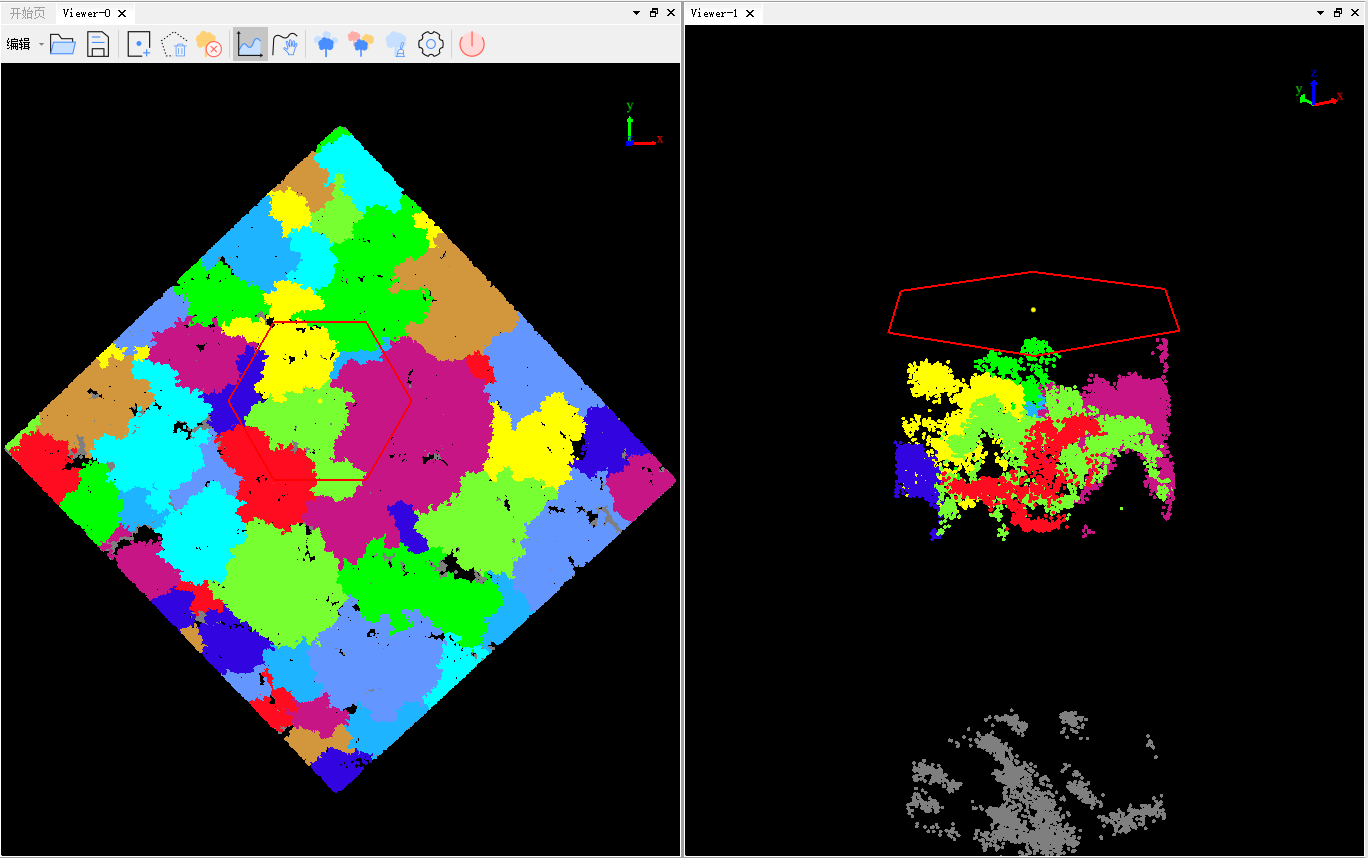
将点云和分割结果加载到软件中,以数据所在窗口为激活窗口,启动ALS编辑工具。点击剖面图按钮![]() ,开启剖面窗口,在点云所在窗口中绘制一个六边形区域,可实时在剖面窗口中查看选择区域的点云和种子点。
,开启剖面窗口,在点云所在窗口中绘制一个六边形区域,可实时在剖面窗口中查看选择区域的点云和种子点。
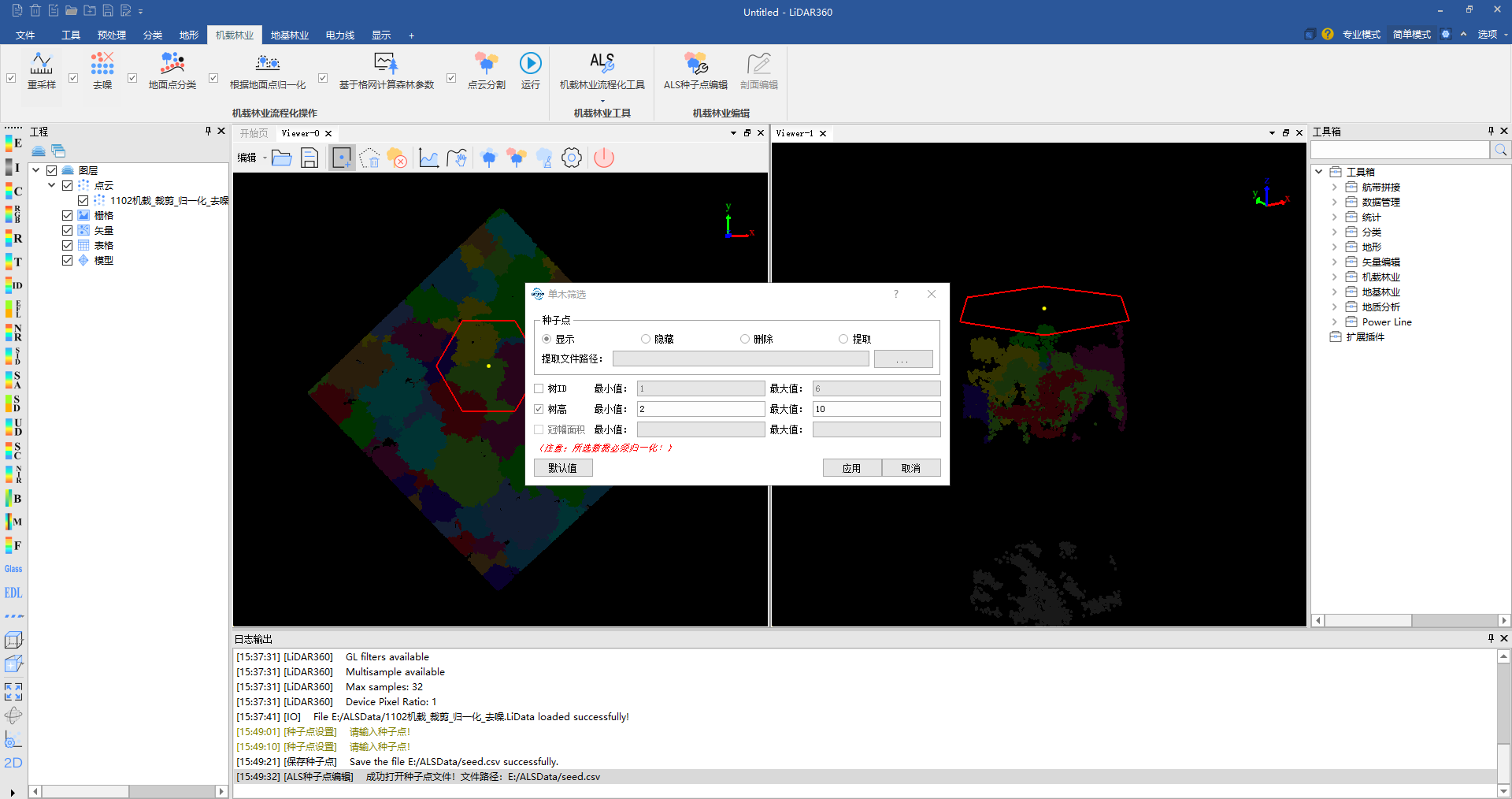
使用单木筛选工具可以查看指定属性范围内的单木结果(高亮显示),如设定查看树冠面积较大或较小的单木(树冠面积较大可能存在欠分割,树冠面积较小一般是枯木或者过分割造成),也可以设定树高较小的单木。
如下图:按树高筛选点云,设置最小值和最大值分别为2.01和10米,位于该范围内的点云将高亮显示。
添加种子点建议选择树顶或者靠近树顶的位置,建议在剖面窗口中增加种子点。
@inproceedings{
author={ Li W K, Guo Q H, Jakubowski M K and Kelly M},
title={A new method for segmentation individual trees from the LiDAR point cloud},
booktitle={ Photogrammetric Engineering and Remote Sensing,78(1):75-84},
year={2012}
}