利用LiDAR360 生成高精度的DEM/DSM/等高线等地形产品
概述
激光雷达(LiDAR)是一种通过位置、距离、角度等观测数据直接获取对象表面点三维坐标,实现地表信息提取和三维场景重建的对地观测技术。利用LiDAR进行目标探测属于主动遥感方式,对天气的依赖性小,不易受阴影和太阳角度的影响。与传统摄影测量技术相比,避免了投影(从三维到二维)带来的信息损失,极大地提高高程获取的精度,且优势明显。利用LiDAR数据可以快速完成数字高程模型(DEM)、数字表面模型(DSM)、等高线等地形产品的大规模生产。
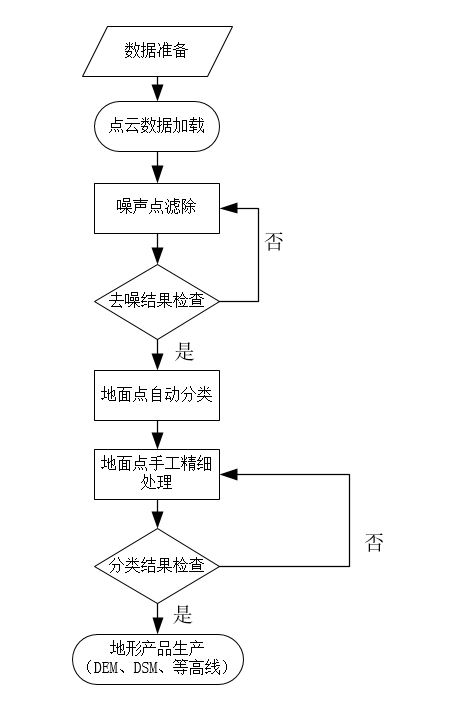
利用LiDAR360生成DEM/DSM/等高线等地形产品主要分为以下步骤:点云数据加载、数据预处理、点云数据去噪、点云滤波(地面点分类)、地面点手工精细分类、DEM/DSM/等高线产品生产。
数据准备
为了生产高精度DEM/DSM/等高线等地形产品,需要在正式生产前对数据进行质量检查,主要包括以下检查内容:
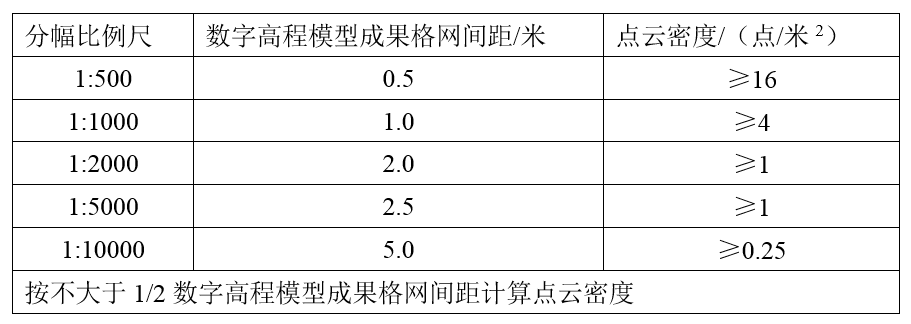
- 点云密度检查:需保证获取的激光雷达点云数据密度能够满足内插DEM的需求。可采用软件中的点密度检查工具对数据进行检查,一般检查裸露的硬直地面区域。具体要求值见下表:
- 点云数据高程精度检查
利用野外控制点数据进行检查,其高程中误差具体要求值如下:
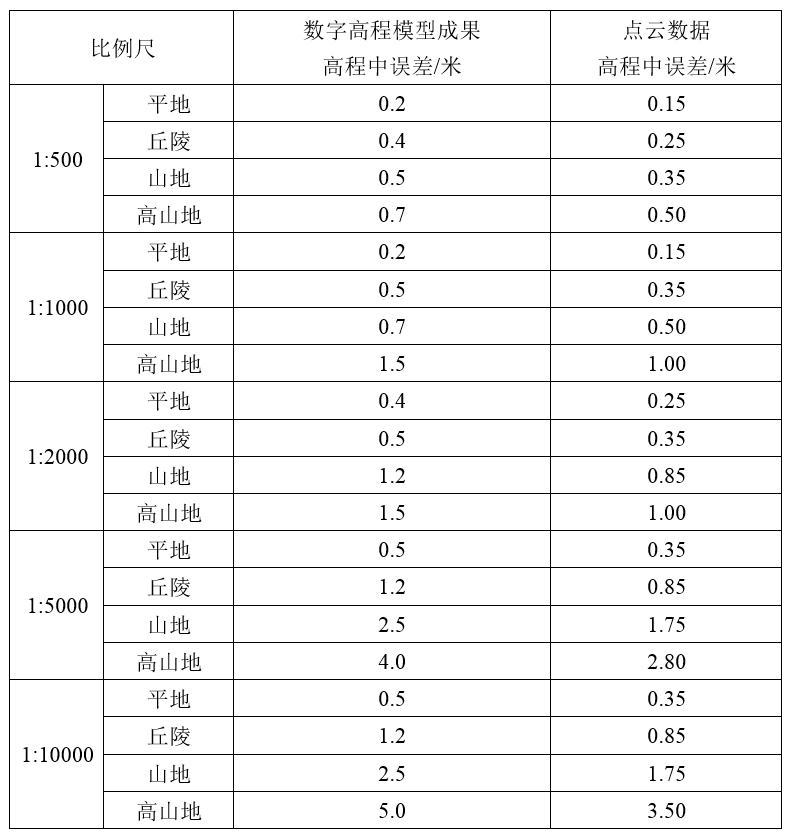
在植被密覆盖区域、反射率较低区域(如水域、光滑表面等易形成镜面反射的区域)等特殊困难地区,点云数据高程中误差在上表基础上可放宽0.5倍。最大允许误差为上表中误差的2倍。
处理步骤
-
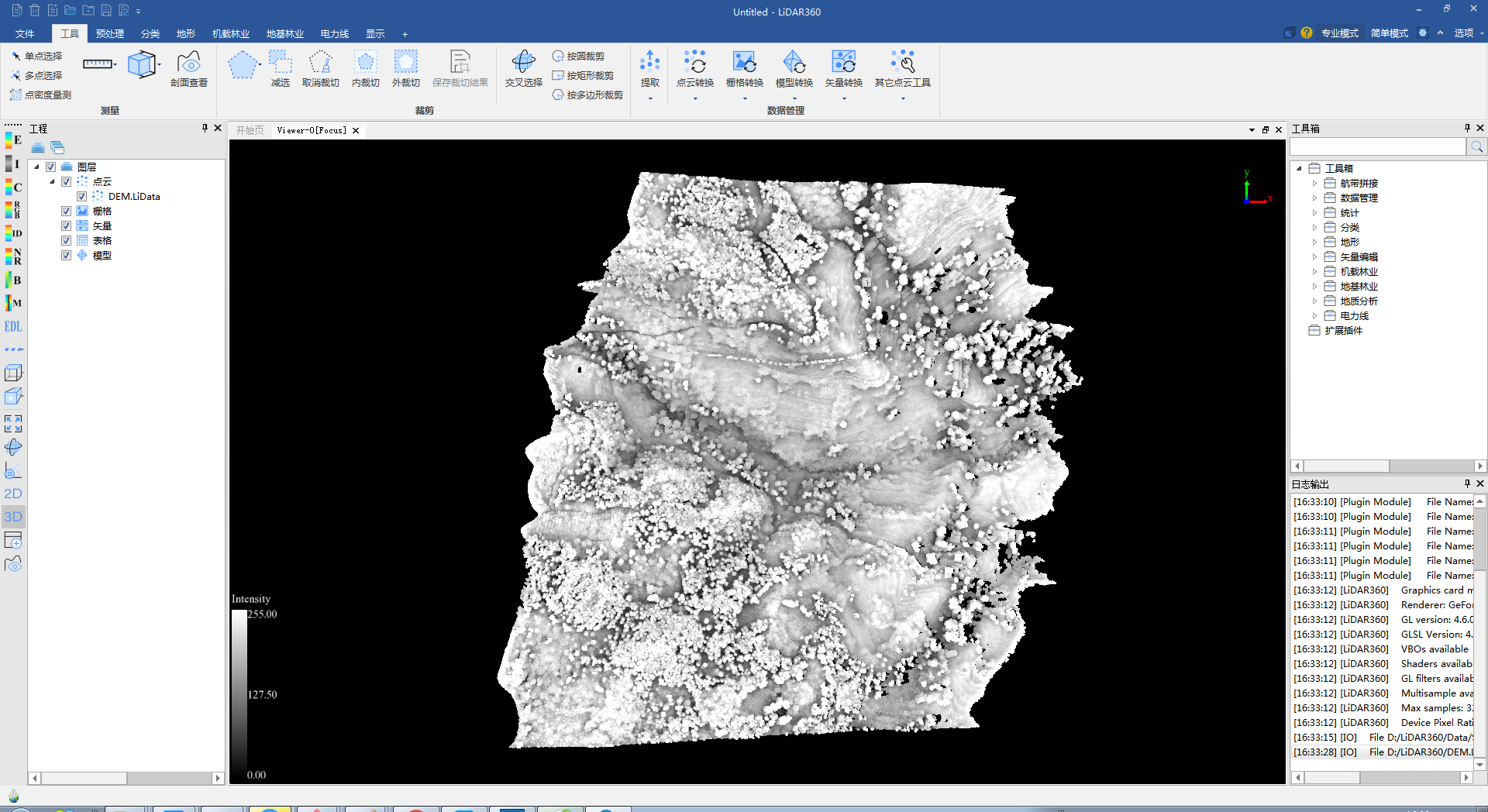
点击数据管理 > 点云工具 > 去噪,对点云数据进行去噪,去除噪点影响。
去噪结果检查,若去噪之后点云中仍然有明显的低点或者空中点,可采用以下方式进行处理:
点击分类 > 地面点分类,从点云中分离地面点,用于生成DEM。
地面点手工精细分类,包括两种方法:
分类完成后,点击工具栏的按类别显示按钮(
 ),查看地面点分类结果。通过平移、旋转、剖面编辑等对分类结果进行检查。若存在明显分类错误,则需要再次进行手工精细分类操作。
),查看地面点分类结果。通过平移、旋转、剖面编辑等对分类结果进行检查。若存在明显分类错误,则需要再次进行手工精细分类操作。点击地形 > 数字高程模型,生成数字高程模型。
点击地形 > 数字表面模型,生成数字表面模型。
点击地形 > 点云生成等高线,生成等高线。