建筑物分类
功能概述
对点云数据中的建筑物进行分类。
用法
点击分类 > 建筑物分类。
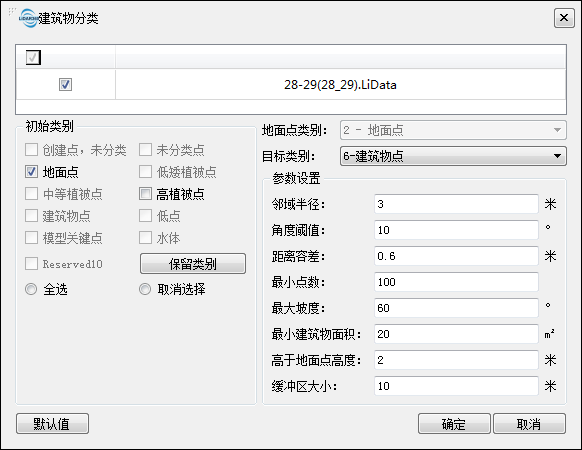
参数设置
- 输入数据:请确保每一个输入的点云数据都是已经进行过地面点分类的数据;输入文件可以是单个点云数据文件,也可以是点云数据集;待处理数据必须在LiDAR360软件中打开。
- 初始类别:待分类类别。
- 地面点类别: 地面点。
- 目标类别:分类目标类别。
- 邻域半径(米)(默认为“3”): 计算点云法向量时的邻域半径,通常设置为点间距的4-6倍。
- 角度阈值(°)(默认为“10”): 平面聚类时两点之间的角度阈值,小于该值则认为是同一簇点云。
- 距离阈值(米)(默认为“0.6”): 平面聚类时点到平面的距离阈值,小于该值则认为是同一簇点云,一般设置为略大于点间距的值。
- 最小点数(默认为“100”): 建筑物面片的最小点数。
- 最大坡度(°)(默认为“60”): 大于该值则认为不是建筑物顶面,而是墙面或者其它类别。
- 最大建筑物尺寸(米)(默认为“60”): 最大建筑物长度,用于分块时,块之间建筑物面片的探测。
- 默认值:点击此按钮,恢复所有参数默认值。
注意:使用该功能要求点云已经进行过地面点分类。