提取中位地面点
功能概述
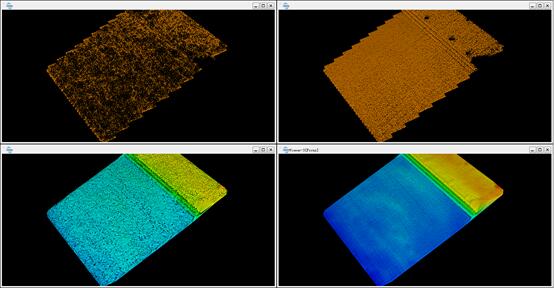
一般情况下,小飞机、无人机(UAV)所扫描的点云数据密度较大、地面点较厚,如果采用传统大飞机提取地面点的方法提取地面点,则所提取的地面点较厚且利用地面点所建立的TIN模型凹凸不平。采用此方法,可以获取较厚地面点中间一层较薄且更平滑的地面点。本方法属于提取出初步地面点之后的优化步骤,因此首先需要点云数据已经利用地面点分类进行过初步的分类。中位数地面点分类前后对比图如下。
用法
点击分类>提取中位地面点。
参数设置
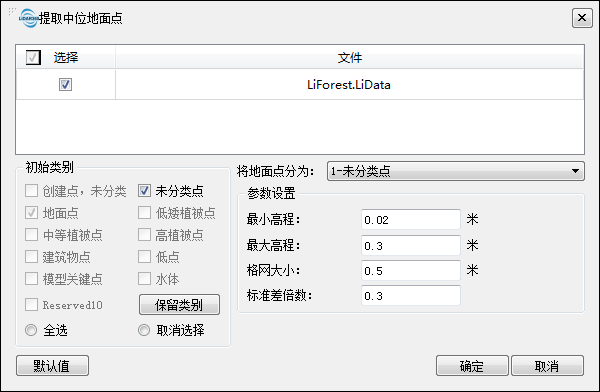
- 输入数据:请确保每一个输入的点云数据都是已经进行过地面点分类的数据;输入文件可以是单个点云数据文件,也可以是点云数据集;待处理数据必须在LiDAR360软件中打开。
- 初始类别:待分类类别。
- 将地面点分为:将原不符合中位数规则的地面点分成的目标类别。
- 最小高程(米)(默认为“0.02”):即从地面最低点起的一定高差作为起始高程,0.02代表从最低点高程起的0.02米作为最小高程。
- 最大高程(米)(默认为“0.3”):即从地面最低点起的一定高差作为终止高程,0.3代表从最低点高程起的0.3米作为最大高程。
- 格网大小(米)(默认为“0.5”):在提取地面点时以格网为单位,当格网内点数少于一定点数,该格网将不进行地面点提取,因此此方法只适用于较厚且点云密度较大的地面点提取。
- 标准差倍数(默认为“0.3”):通过设置标准差倍数来控制所提取点云地面点的数量及厚度。默认值0.3,即提取地面点的22%作为地面点(同理,0.5对应40%,0.7对应50%,0.9对应62%,1.5对应86%)。
- 默认值:点击此按钮,恢复所有参数默认值。
注意:此分类算法只适用于小飞机、无人机(UAV)所扫描的地面点较厚数据,而且待分类数据需进行过地面点分类,此功能属于优化步骤。