创建转换关系
功能概述
用户可以定义和编辑多种转换关系,这些转换关系可以保存到历史文件中供用户再次使用。这些转换关系可以在“转换关系计算”以及导入数据时被定义。
1ppm = 0.001‰ 定义为百万分之一
支持的转换关系:
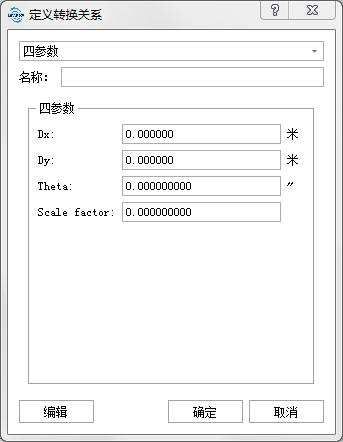
- 四参数:
- 平移参数Dx(米,默认为0)。
- 平移参数Dy(米,默认为0)。
- 旋转参数Theta(秒,默认为0)。
- 缩放比例t(默认为1.0)。
- 高程拟合 :可勾选是否进行高程拟合,若勾选高程拟合则需要从下拉列表中选择事先定义好的高程拟合参数。定义高程拟合参数的方法可参考。高程拟合解算。
注:当Dx = 0,Dy = 0,Theta = 0, t = 1.0 时进行转换,将得到原始点云。
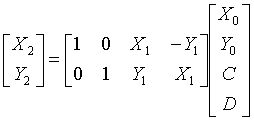
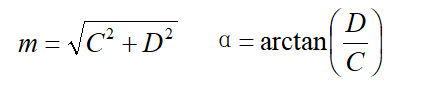
四参数的公式可写为如下的形式:
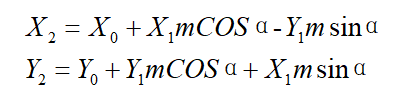
可以按照下面公式求解:
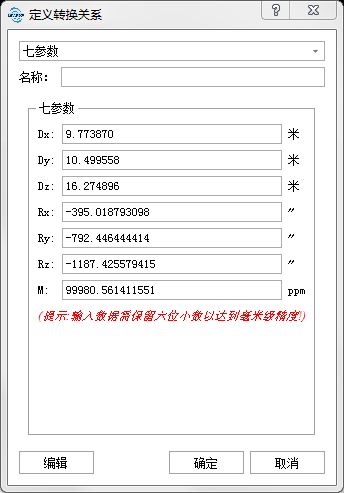
七参数:布尔沙模型中的七个参数。
- 平移参数Dx(米,默认为0)。
- 平移参数Dy(米,默认为0)。
- 平移参数Dz(米,默认为0)。
- 旋转参数Rx(秒,默认为0)。
- 旋转参数Ry(秒,默认为0)。
- 旋转参数Rz(秒,默认为0)。
缩放比例m(ppm)。
注:七参数中的比例尺m与四参数中的比例尺t不同,二者可以相互转化,转换关系为 m = (t - 1.0) * 1e6。假设t为 0.9999988,那么 m = (0.9999988 - 1.0) * 1e6 = -1.2 。
布尔莎七参数的公式可写为如下的形式:
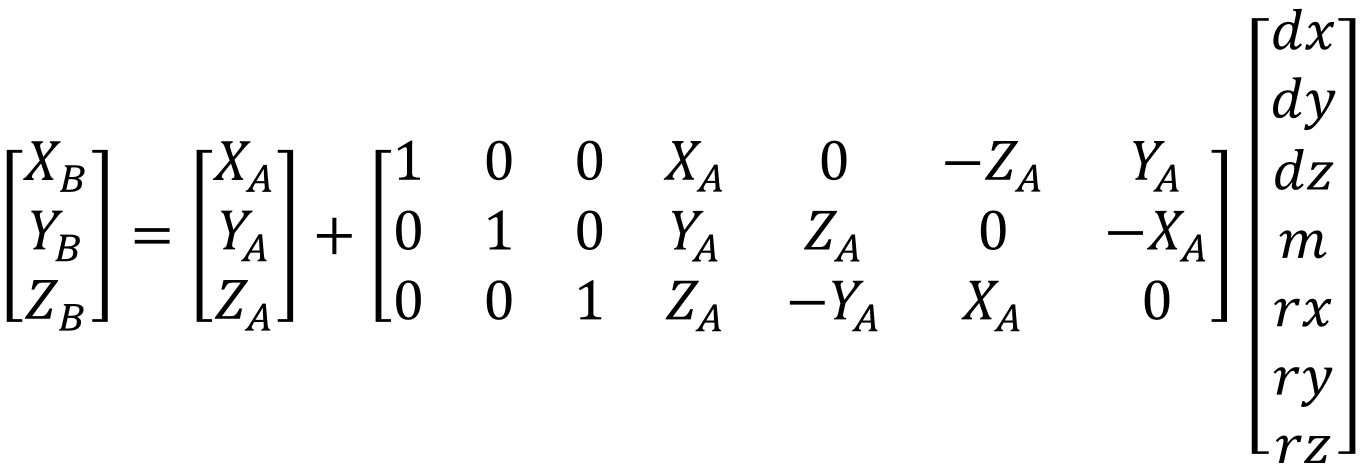
该七参数模型可转化为3D仿射变换参数,转化关系为:
Dx = Dx;
Dy = Dy;
Dz = Dz;
Rx(″) = Rx(″);
Rx(″) = Rx(″);
Rx(″) = Rx(″);
Mx(ppm) = m(ppm);
My(ppm) = m(ppm);
Mz(ppm) = m(ppm);
- 3D仿射变换:
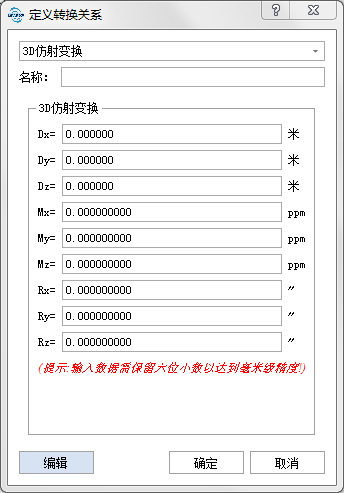
- Dx、Dy、Dz(米,默认为“0”):添加到X、Y、Z上的值(平移量)。
- Mx、My、Mz(ppm,默认为“0”):应用到X、Y、Z轴上的尺度因子。与七参数中的比例尺因子m定义相同。
- Rx、Ry、Rz(秒,默认为“0”):绕X、Y、Z轴旋转的角度,以度表示。
注意:要达到毫米级精度,小数点后至少保留六位小数。
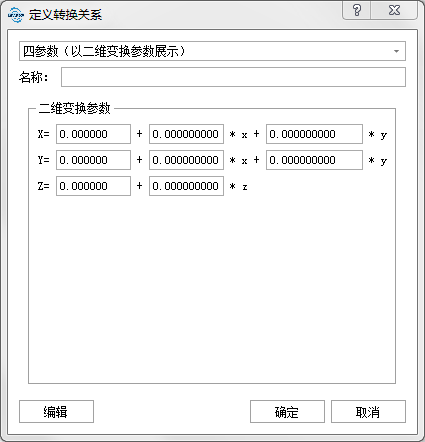
- 四参数(以二维变换参数显示):二维变换参数,也称为XYMultiply。
二维变换参数可以由下列公式表示:
其中,Px、Py、Pz、a、b、c、d、e为变换参数,Sx、Sy、Sz为原始坐标,X、Y、Z为变换后的坐标。这是经常用来作为2D赫尔默特类型的转换。该参数也可以由四参数转化而来。假设四参数为:Dx、Dy、theta、t,则转化方法为:
Px = Dx;
Px = Dy;
Pz = 0.0;
定义 k = t;
定义 tRad = theta / 3600.0 / 180 * PI;
则:
a = k * cos(tRad);
b = -k * sin(tRad);
c = k * sin(tRad);
d = k * cos(tRad);
e = 1.0;
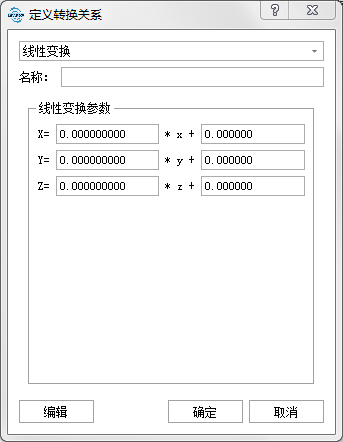
- 线性变换:线性变换用于对点云坐标进行平移和缩放,可对X、Y、Z坐标分别输入一个平移和缩放参数。
线性变换以下公式表示:
其中:Sx、Sy、Sz为x、y、z坐标的缩放因子,Px、Py、Pz为x、y、z坐标的平移参数,x、y、z为原始坐标,X、Y、Z为线性变换后得到的坐标。
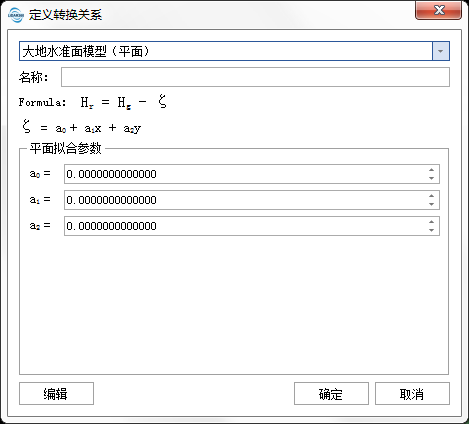
- 高程拟合参数:用于已知xy的情况下计算出高程异常,进而对Z进行改正。
- 平面拟合。 平面拟合公式为 ζ = a0 + a1x + a2y; 共含有a0-a2三个参数。
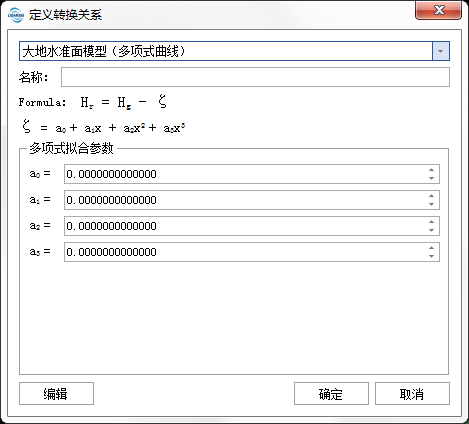
- 线性插值。 线性插值公式为 ζ = a0 + a1x + a2x² + a3x³; 共含有a0-a3四个参数。
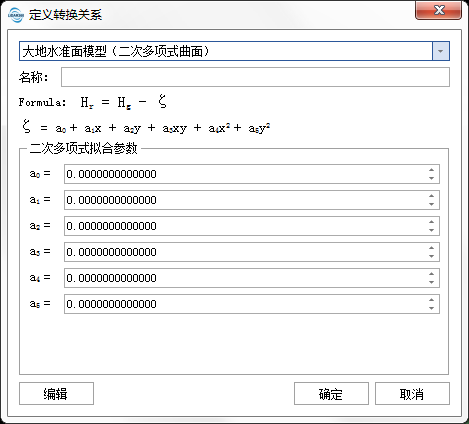
- 二次曲面拟合。 ζ = a0 + a1x + a2y + a3xy + a4x² + a5y²; 共含有a0-a5六个参数。
- 三次曲面拟合公式为 ζ = a0 + a1x + a2y + a3xy + a4x² + a5y² + a6x²y + a7xy² + a8x³ + a9y³; 共含有a0-a9 十个参数。