提取巷道点
功能概述
通过从外部导入或手动绘制的方式生成中心线,然后沿着中心线去除巷道内部的噪点,并生成新文件。算法首先会提取中心线周围一定范围内的巷道点云,并将巷道点云沿着中心线按照一定步长进行垂直切片。然后计算每一个切片的外环(巷道边界),并去除内部噪点,最后再将结果合并。此功能适用于洞穴、盾构隧道、地下巷道等数据。
用法
点击 矿山 >巷道 > 提取巷道点 。
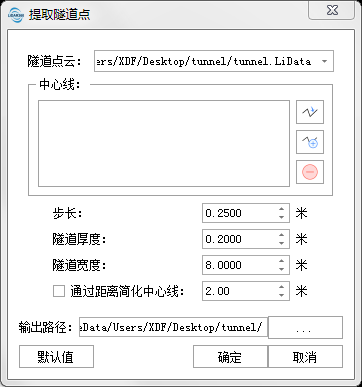
参数设置
- 输入点云数据:输入文件可以是单个点云数据文件,待处理数据必须在LiDAR360软件中打开。
中心线:目前支持“从文件导入”和“手动绘制”两种方式获取中心线。算法会提取这些中心线周围的巷道点云并去噪,最后生成新文件。
- 从文件导入:支持SHAPE格式和ASCII格式的中心线文件。中心线文件需至少包含两列,分别为:X、Y。中心线文件导入后,将在场景中显示。该中心线需要和点云套合,否则功能无法正常运行。
- 手动绘制:用户可以使用交互多段线作为媒介自动计算中心线。点击按钮
 在视图中鼠标左键开始绘制多段线,双击结束绘制当前多段线择,并加入到多段线列表。在列表中选择一个多段线,点击按钮
在视图中鼠标左键开始绘制多段线,双击结束绘制当前多段线择,并加入到多段线列表。在列表中选择一个多段线,点击按钮 可以删除相应的多段线。
可以删除相应的多段线。
步长(米)(默认为“0.25”): 沿着中心线以该步长对巷道进行纵向剖切,并对剖切后的每一段点云单独进行去噪。步长影响算法效率和精细程度。步长越小,效率越低,去噪效果越精细。当巷道表面一致性较好且方向变化平缓时,可以适当调大该值。
- 巷道厚度(米)(默认为“0.2”):巷道厚度是指巷道内壁到巷道表面的平均距离。大于此距离的巷道内的点将判别为噪点。
- 最大巷道净宽(米)(默认为“8”):巷道净宽是指巷道内轮廓断面的最大宽度,决定了中心线两侧点云的提取范围。此值需要大于整条巷道净宽的最大值,以避免在计算过程中无法取得巷道点云。