点云分割
功能概述
不同于机载激光雷达点云自上而下的分割方法,地面激光雷达点云通常是从冠层下面获取的,因此可以清晰地识别树干,并以此分割出单木(Tao et al., 2015)。在这种情况下,可以测量出单木胸径这一属性。
用法
点击地基林业 > 点云分割。
参数设置
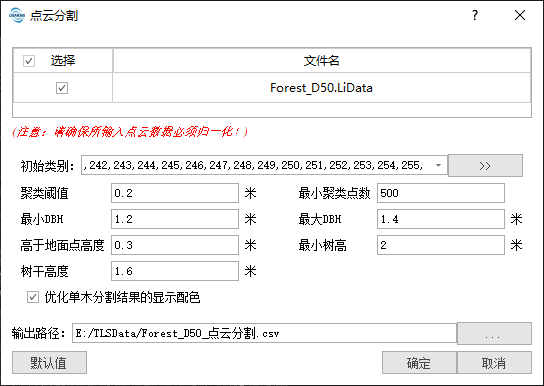
- 输入数据:输入数据必须是归一化后的点云数据,归一化的方法请参考归一化或根据地面点归一化。输入文件可以是单个点云数据文件,也可以是点云数据集;待处理数据必须在LiDAR360软件中打开。
- 选择类:参与点云分割的起始类别,默认选择全类别。
- 聚类阈值(米)(默认为“0.2”):用户通过调节该参数可控制单木分割效率和精度。该值控制单木 探测与单木冠层点云生长。聚类阈值越大,单木分割效率越高,但过大会影响分割效果。
- 最小聚类点数(默认为“500”):该值主要影响单木冠层点云生长。设置点数越小,分割效果越好,速度越慢,反之亦然。
- 最大DBH(米)(默认为“1.4”):参与拟合胸径点云的高程最大阈值。
- 最小DBH(米)(默认为“1.2”):参与拟合胸径点云的高程最小阈值。
- 高于地面点高度(米)(默认为“0.3”):高于该值的点云才参与单木分割。该参数用于减弱地表点云厚度或杂草对单木分割效果的影响。该值设置过大,会影响探测树木杆径的准确度。
- 最小树高(米)(默认为“2”):参数可根据当地树木的长势所定,可用来过滤小树。
- 树干高度(米)(默认为“1.6”):算法会截取 高于地面点高度 到 树干高度 范围内的点云进行树干探测,作为树木生长的起始点云。建议该参数设置在枝下高位置。
- 优化单木分割结果的显示配色(默认选中):通过重新排列单木分割后的ID信息,能够极大程度解决相邻树木赋同一颜色问题。
- 输出路径:运行后,每个点云数据将生成对应的分割结果,分割结果是逗号分隔的CSV表格,其中包含树木ID、x、y坐标位置、树高、胸径、冠幅直径、冠幅面积、冠幅体积属性,可参考附录中的地基点云单木分割结果文件格式,查看分割结果的方法请参考查看点云分割结果。
- 默认值:将参数设置恢复为默认值。
@inproceedings{
author={Tao S L, Wu F F, Guo Q H, Wang Y C, Li W K, Xue B L, Hu X Y, Li P, Tian D, Li C,Yao H, Li Y M, Xu G C and Fang J Y},
title={Segmentation tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories},
booktitle={ISPRS Journal of Photogrammetry and Remote Sensing,110:66-76},
year={2015}
}