地面点分类
功能概述
地面点分类是点云数据处理的基础操作,LiDAR360采用的是改进的渐进加密三角网滤波算法(Improved Progressive TIN Densification, IPTD(Zhao et al.,2016))分类地面点。
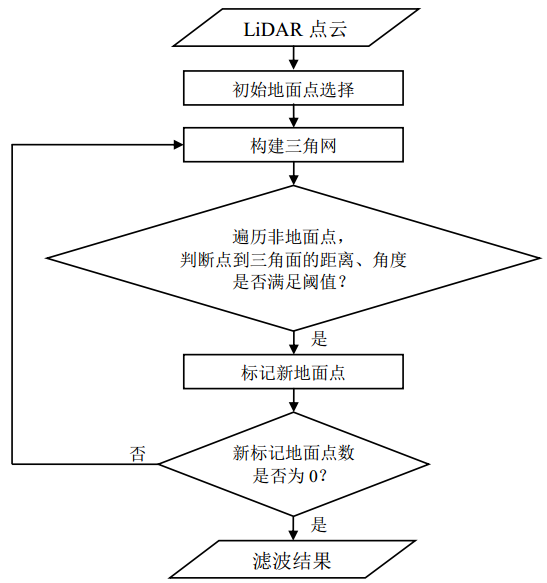
此算法首先通过种子点生成一个稀疏的三角网,然后通过迭代处理逐层加密。直至将所有地面点分类完毕,算法的具体步骤如下:
- 初始种子点的选择。在含有建筑物的点云数据中,量取最大建筑物尺寸作为格网大小对点云数据进行格网化,对于不含建筑物的点云数据,以默认值作为格网大小。取格网内的最低点作为起始种子点。
- 构建三角网。利用起始种子点构建初始三角网。
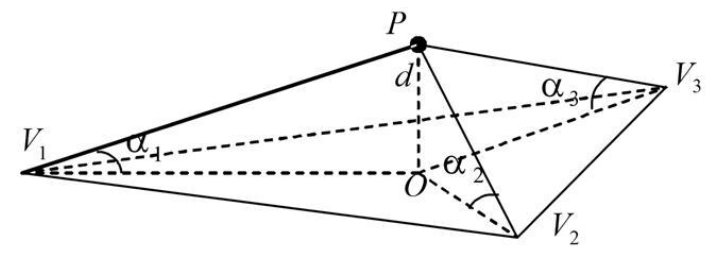
- 迭代加密过程。遍历所有待分类的点,查询各点水平面投影所落入的三角形,计算点到三角形的距离d及点到三角形三个顶点与三角形所在平面所成角度的最大值,如下图,将其分别与迭代距离与迭代角度进行比较,如果小于对应阈值,则将此点判定为地面点,并加入三角网中。重复此过程,直至所有地面点分类完毕。
算法流程如图。
用法
点击分类 > 地面点分类。
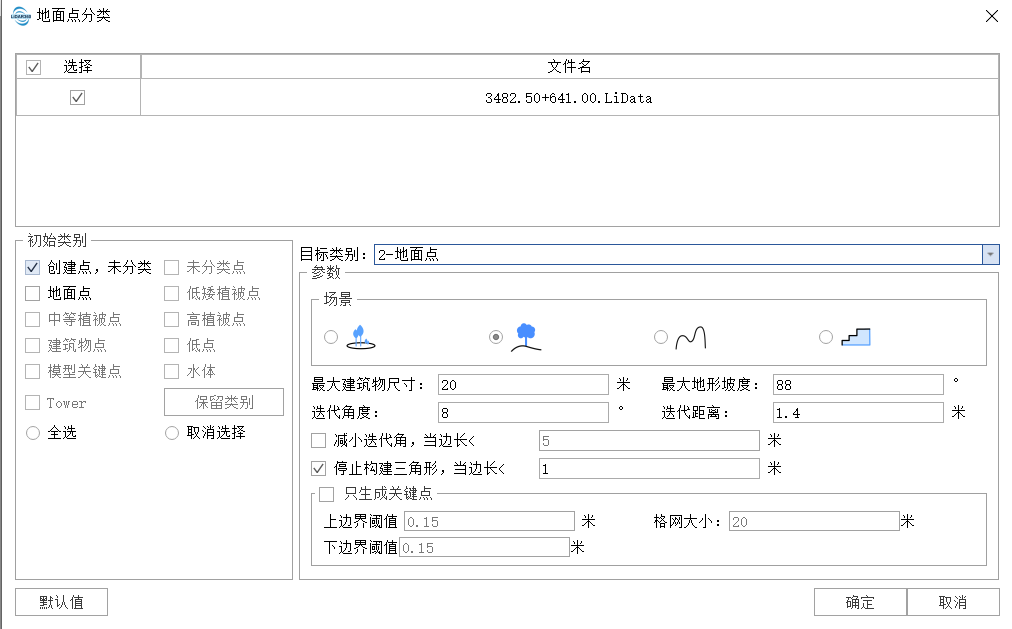
参数设置
- 输入数据:输入文件可以是单个点云数据文件,也可以是点云数据集;待处理数据必须在LiDAR360软件中打开。
- 初始类别:待分类类别。
- 目标类别:分类目标类别。
- 场景:用户需要根据实际情况选择匹配的地形场景。分类参数会根据所选地形而改变。
- 最大建筑物尺寸(米)(默认为“20”):扫描点云中存在的建筑物最大长度,一般量取斜对角长度。此参数设置过小,建筑物的平顶可能被误认为地形,建筑物屋顶点会被误分为地面点。参数设置过大,会导致初始种子点过少,不利于地面点分类效率及地形起伏剧烈区域分地面点。当点云数据中有建筑物时,可以利用菜单栏的长度量测工具测量最大建筑物尺寸,该参数的值应大于测量得到的最大建筑物尺寸。对于不含建筑物的点云数据,此参数可适当减小。对于没有建筑物的地势起伏大的山区,可适当调小此值以适应坡度较陡的地面。
- 最大地形坡度(°)(默认为“88”):点云中显示的地形最大坡度。该参数可以确定已被识别的地面点的相邻点是属于地形还是其他地物。一般情况下,此参数选择默认值即可。
- 迭代角度(°)(默认为“8”):待分类点与已知地面点间允许的角度范围。对地形起伏较大的区域可适当设置大一些,与迭代距离对应调节。一般设置为6~12度。
- 迭代距离(米)(默认为“1.4”):待分类点与三角网对应的三角形之间的距离阈值。地形起伏较大时可适当调大,与迭代角度对应调节,一般设置为1.2-1.6米。
- 减小迭代角,当边长<(米)(默认为“5”)(可选):待分类点对应三角形边长小于此阈值时减小迭代角。勾选该参数,表示当待分类点对应于三角网中三角形边长小于该阈值时,相应减小迭代角,可以获取更平滑地面点。当需要得到较稀疏地面点时,可相应增大此阈值,反之,则减小此阈值。
- 停止构建三角形,当边长<(米)(默认为“2”)(可选):待分类点对应三角形边长小于该阈值时,则停止加密三角网,该值可防止生成地面点过密。增大此值时,地面点会相应稀疏,反之,则加密。
- 只生成关键点(可选):在地面点滤波的基础进一步提取模型关键点作为地面点类别,该功能可保留地形上的关键点而相对抽稀平缓地面区域的点。该功能具体使用方法见模型关键点分类。
- 默认值:点击此按钮,恢复所有参数默认值。
注意:因实际地形复杂多变,故利用此功能进行地面点分类时,针对不同地形点云数据应调节相应不同参数来进行分类,才能达到相对理想效果。除此之外还可以通过选择区域地面点分类进行局部区域重新分类,也可采用交互式编辑分类工具进行局部地面点分类。
@inproceedings{
author={Zhao X Q, Guo Q H, Su Y J and Xue B L},
title={Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas},
booktitle={ISPRS Journal of Photogrammetry and Remote Sensing,117:79-91},
year={2016}
}