危险点检测
功能概述
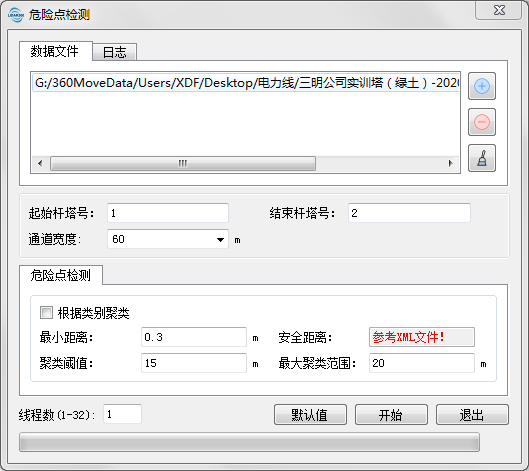
根据杆塔文件对点云进行流程化处理,生成危险点图像和报告。数据流程化处理界面如下图所示,该功能可以同时处理多个数据,点击![]() 添加待处理的数据,点击
添加待处理的数据,点击![]() 移除选中的数据,点击
移除选中的数据,点击![]() 清空数据列表。
清空数据列表。
用法
点击电力线 > 危险点
参数设置
- 起始杆塔号:索引号小于该值的杆塔不参与计算。默认值为杆塔文件中的最小Index。
- 结束杆塔号:索引号大于该值的杆塔不参与计算。默认值为杆塔文件中的最大Index。
通道宽度(米)(默认为"60"):沿着电力线方向,向两边延伸的宽度。软件可以记录用户当前的设置,再次打开时自动恢复该设置。
检测参数:根据设置的安全距离阈值,检测净空危险点。
- 根据类别聚类:默认不选中,用以控制是否按照类别进行聚类。选中则按照不同类别将危险点聚类为不同簇,反之则不考虑类别影响直接聚簇。软件可以记录用户当前的设置,再次打开时自动恢复该设置。
- 最小距离(米)(默认值为"0.3"):小于该距离的点不对其进行危险点检测,认为其是由于噪声引起的危险点。软件可以记录用户当前的设置,再次打开时自动恢复该设置。
- 安全距离(米)(依据xml配置文件):若检测类别点与电力线点间的距离大于最小距离并小于等于安全距离,判定该点为危险点。若未配置xml文件,安全距离值由用户输入,反之则取值于xml文件,两者之间差别是xml配置安全距离参数不仅可以针对不同的类别设置不同的安全距离,而且针对不同安全等级可分段设置安全距离。
- 聚类阈值(米)(默认值为"15.0"):对净空危险点进行聚类时最大空间间隔距离,该值小于最大聚类范围值,采用三维欧氏聚类对危险点进行聚类。软件可以记录用户当前的设置,再次打开时自动恢复该设置。
- 最大聚类范围(米)(默认值为"20.0"):净空危险点聚类后如果沿电力线方向长度大于该值,则分成多个危险点簇。软件可以记录用户当前的设置,再次打开时自动恢复该设置。
- 线程数(默认值为"4"):设置功能运行线程数,可支持1-32个线程。软件可以记录用户当前的设置,再次打开时自动恢复该设置。
- 默认值:恢复默认参数设置。