安置误差计算
激光扫描参考坐标系 与 定位惯导平台参考坐标系 之间的安置误差是机载激光雷达中最大的系统误差源。这些安置误差对地面激光脚点坐标的影响还取决于飞行的高度和扫描角的大小。
LiDAR360提供两种方式消除安置误差:
- 人工量测检校
- 自动平差修正
以下详细说明它们的原理。
人工量测检校
首先需要准备检校数据,通常是沿相互垂直的前后左右四个方向飞行。在飞行后对地面规则的地物(如操场、规则房屋等)进行量测,基于重叠的激光脚点数据可以使用分步几何法(Zhang et al., 2010)恢复出安置角误差(即旋转量)修正值。而安置偏移误差(即平移量)影响较小,人工量测检校不对其进行修正。
估算侧滚角误差(ΔRoll)
侧滚向的安置角误差会使平面扫描线产生倾斜(如下图),且会使被扫描物体的平面位置沿扫描方向(垂直于飞行方向)产生偏移。
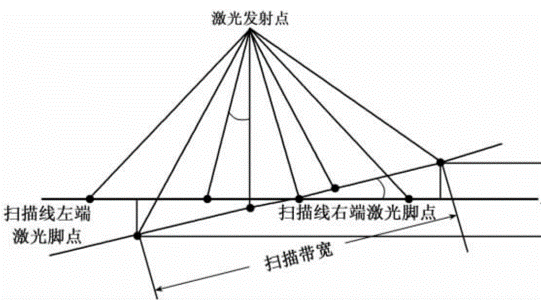
在同航高往返飞行的两条航带数据中,
- 垂直于飞行方向开启剖面,量测近似同名地物高差∆ℎ;
- 在2D视图中量测近似同名地物与两条航带中心线的水平距离r。
则侧滚角误差的估算公式如下:
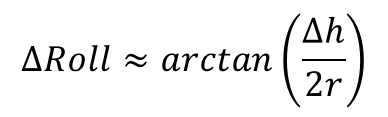
估算俯仰角误差(ΔPitch)
在线扫描模式下,俯仰向的安置误差主要使被扫描物体的真实位置沿着与扫描线垂直的方向产生偏差。以下给出了俯仰向安置误差对扫描激光脚点的影响示意图。
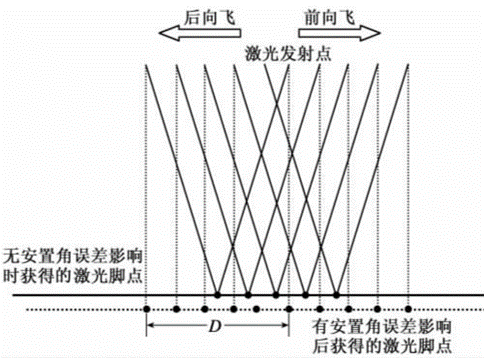
在往返飞行的两条航带数据中:
- 平行于飞行方向开启剖面,量测同一地物中心位置沿飞行方向的距离差D,
- 根据轨迹计算平均飞行高度H(往返飞行高度尽量保持一致)。
则俯仰角误差的估算公式如下:
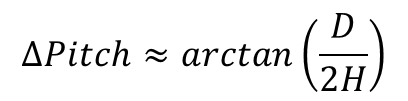
估算航向角误差(ΔHeading)
航向角安置误差会改变被扫描物体的中心位置,同时使物体产生变形,如下图所示。
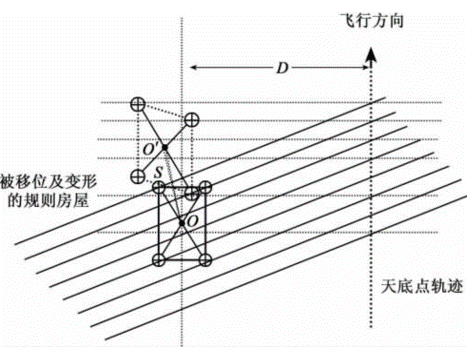
在前向与后向飞行的两条航带数据中开启2D视图,
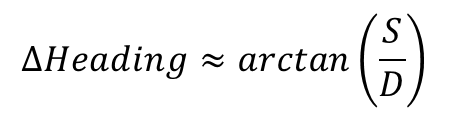
- 量测两次地物激光脚点平均中心位置之间的距离S
- 量测两条航带之间的距离D
则航向角误差的估算公式如下:
自动平差修正
手动量测估算需要相关专业知识以及对软件的熟练操作,而自动计算能够极大减轻操作员的工作量。在特征明显的数据中,自动计算完全能够替代手工计算,达到相同甚至更高的精度。
自动算法不仅能够修正安置角误差(即旋转量),还能修正安置偏移误差(即平移量)。可自由选择需要修正的数值,推荐仅修正安置角误差,因为它们的影响最大。算法的原理如下:
- 提取相邻航带中的特征点及法向量,参考算法(Glira et al., 2015)
- 匹配相邻航带中提取的特征点,获得相关点对
- 建立安置误差修正模型,计算相关点对沿法向量的距离
- 采用最小二乘法,使相关距离最小化,同时得到修正值最优解
@inproceedings{
author={Zhang Xiaohong, Forsberg Rene},
title={Retrieval of Airborne Lidar Misalignments Based on the Stepwise Geometric Method},
booktitle={Survey Review 42(316):176-192 April 2010},
year={2010},
}
@inproceedings{
author={Philipp Glira, Norbert Pfeifer, Christan Briese and Camillo Ressl},
title={A Correspondence Framework for ALS Strip Adjustments based on Variants of the ICP Algorithm},
booktitle={PFG Photogrammetrie, Fernerkundung, Geoinformation Jahrgang 2015 Heft 4},
year={2015},
}