用户手册
版权信息
简介
安装
操作环境
安装步骤
许可证管理器
程序语言切换
工具说明
起始页
工具栏
颜色工具
显示模式
EDL显示
实时等高线
玻璃
视图工具
设置工具
全局显示
交叉选择
设置点大小与类型
新建窗口以及2D/3D视图
剖面查看
快速工具栏
添加数据
加载并合并点云数据
删除数据
导出数据
工程操作
Ribbon工具栏
批处理工具
选项
快捷方式
工程管理窗口
图层管理
图层管理_点云
图层管理_栅格
图层管理_矢量
图层管理_表格
图层管理_模型
窗口管理
文件
Ribbon 页
工具
测量
单点选择
多点选择
长度量测
面积量测
角度量测
高度量测
坡度量测
体积量测
实体模型体积量测
点密度量测
剖面查看
选择工具
多边形选择
交叉选择
按圆裁切
按矩形裁切
按多边形裁切
数据管理
预处理
分类
矢量编辑
编辑
实体矢量化
要素提取
实用工具
剖面编辑
按高度过滤
高程模式
关联窗口
实体修改
实体选择
实体捕捉
图层管理
参考平面
地形
机载林业
地基林业
电力线
矿山
建筑物
自动创建建筑物模型
编辑
实用工具
手动创建建筑物模型
建筑物高程模式
建筑物编辑
辅助工具
界面显隐
建筑物模型列表
显示工具
显示和记录
渲染到图像
相机漫游
录屏
背景网格
相机设置
显示模型
显示三角网
显示点
窗口
新建窗口
关闭当前窗口
关闭所有窗口
视图布局
平铺窗口
Tab视图
操作
窗口联动
卷帘
转到
分类编辑
分块编辑工具
剖面绘制工具
断裂线绘制工具
断裂线工具
地形点模拟工具
DEM预览工具
TIN工具
选择工具
分类方法面板
剖面窗口工具
剖面查看
剖面绘制工具
剖面窗口工具
航带拼接
航带拼接
安置误差计算
航带平差
控制点报告
航线质量检查
高差质量检查
航带重叠分析
密度质量检查
数据管理
点云工具
去噪
噪声滤波
归一化
根据地面点归一化
反归一化
合并
边界提取
重采样
PCV
纹理映射
点云分幅
GPS时间转换
点云平滑
按属性聚类
植被指数
栅格工具
影像镶嵌
影像分幅
栅格计算器
分块
按范围分块
按点数分块
按直线分块
按多边形分块
投影与坐标转换
定义投影
重投影
坐标转换
转换投影面高程
高程调整
转换关系计算
大地水准面拟合
ICP配准
转换ASCII到BLH
手动配准
手动旋转和平移
大地水准面模型
创建转换关系
裁剪
按圆裁剪
按矩形裁剪
按多边形裁剪
点云格式转换
转换为ASCII
转换为TIFF
转换为Shape
转换为DXF
转换为LAS
转换为E57
转换LiData为LiData
LAS转换为LiData
栅格格式转换
TIFF转换为LiModel
转换为带纹理的LiModel
TIFF转换为LiData
TIFF转换为ASCII
模型格式转换
LiModel转换为TIFF
LiTin转换为DXF
LiBIM转换为OBJ
LiBIM转换为FBX
LiBIM转换为CityJSON
矢量格式转换
Shape转换为KML
KML转换为Shape
提取
按类别提取
按高程提取
按强度提取
按回波次数提取
按GPS时间提取
按附加属性提取
按组提取
建筑物模型工具
LiBIM合并
统计
格网统计
格网体积统计
栅格统计
分类
坡度滤波
二次曲面滤波
地面点分类
CSF地面点滤波
提取中位地面点
按属性分类
分离低点
低于地表分类
孤立点分类
空中噪点分类
噪声点分类
高于地面分类
按高差分类
邻近点分类
按范围分类
建筑物分类
模型关键点分类
机器学习分类
按机器学习模型分类
选择区域地面点分类
交互式编辑分类
按附加属性分类
深度学习分类
自定义深度学习分类
地形
插值参数设置
数字高程模型
数字表面模型
冠层高度模型
数字正射影像
山体阴影
坡度
粗糙度
坡向
栅格生成等高线
生成高程注记点
点云生成等高线
生成TIN
Tin生成等高线
Tin生成DEM
DEM接边
DEM精度分析
偏差分析
变化检测
断面分析
LiModel编辑
LiTin编辑
模型平滑
机载林业
高度变量
强度变量
郁闭度
叶面积指数
间隙率
森林参数
基于格网计算森林参数
基于多边形计算森林参数
基于林分计算森林参数
回归分析
样本数据和自变量
线性回归
支持向量机
快速人工神经网络
随机森林回归
回归预测
单木分割
CHM分割
查看CHM分割结果
点云分割
查看点云分割结果
CHM生成种子点
层堆叠生成种子点
基于种子点分割
批处理
森林参数批处理
点云分割批处理
CHM分割批处理
配准
基于树木位置的自动配准
清除树ID
根据文件清除树ID
统计单木属性
树木建模
按树ID提取点云
森林结构变化检测
单木分割接边
ALS种子点编辑
单木点云编辑
地基林业
叶面积指数
覆盖度
孔隙率
点云分割
查看点云分割结果
基于种子点的单木分割
清除树ID
根据文件清除树ID
按树ID提取点云
统计单木属性
扩展单木属性
单木报告
树木建模
树种标识
提取桉树树干
提取树干(TLS)
提取枝下高
TLS种子点编辑
TLS单木点云编辑
DBH量测
电力线
配置
标记杆塔
自动分类
危险点检测
清除危险点
地质分析
流向
流向累积量
填洼
查询倾角和走向
矿山
巷道
提取巷道点
三角网建模
计算法向量
泊松建模
露天矿
体积变化分析
边坡线提取
行业应用教程
航带拼接
DEM/DSM/等高线生产
机载点云单木分割
机载点云回归分析
电力线危险点检测
附录
关键术语
文件格式
LiData
LiAtt
LAS
LiModel
LiTin
裁切范围文件
圆形范围文件
矩形范围文件
按GPS时间提取文件
同名点对文件格式
POS文件
OUT文件
控制点文件
高程注记点文件
样地数据文件
种子点文件
单木分割结果文件格式
七参数计算控制点文件格式
断面成果输出文件格式
矩阵文件格式
中心线文件格式
LiBIM文件格式
批处理json调用功能ID列表
快捷键
常用菜单栏快捷键
常用视图窗口快捷键
剖面编辑快捷键
调整高性能显示模式
FAQ
安装和授权常见问题
平台常见问题
航带拼接常见问题
地形模块常见问题
林业模块常见问题
Changelog
本书使用 GitBook 发布
坡度滤波
坡度滤波
功能概述
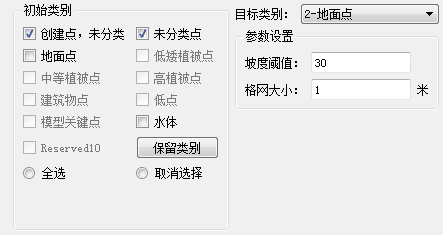
顾名思义,此滤波方法基于点云坡度变化提取地形。因此,其弊端是对坡度变化敏感,对坡度陡峭地区不甚可靠,容易削平地形上的凸起部分,此方法更适合地形变化平缓区域,滤波效率高。相关界面参数如下图。
参数设置
初始类别
:待分类类别。
目标类别
:分类目标类别。
坡度阈值(°)(默认为“30”)
:当前点与邻域8格网低点的最大坡度阈值。大于阈值则分为非地面点,反之,分为地面点。
格网大小(米)(默认为“1”)
:即点云格网化时格网边长的大小,滤波窗口为3*3格网。
results matching "
"
No results matching "
"