安置
功能描述:安置模块提供安置误差检校从而实现对机载激光雷达点云数据的安置误差校正处理。该模块包含对机载激光雷达点云数据采集航迹线进行加载、删除、选择、分割、根据航迹线裁切点云、航迹线与点云匹配、依据航带安置误差信息对点云进行变换(误差修正)、去冗余等功能。
用法
打开安置模块。点击工具箱>航带拼接>安置 或点击 预处理->安置 软件弹出安置模块,模块初始界面包括工具栏和航迹线列表窗口:

 打开航迹线文件。点击该按钮,提示设置工作区。按提示设置好工作区后,自动弹出加载航迹线文件的界面,如下图所示。
打开航迹线文件。点击该按钮,提示设置工作区。按提示设置好工作区后,自动弹出加载航迹线文件的界面,如下图所示。
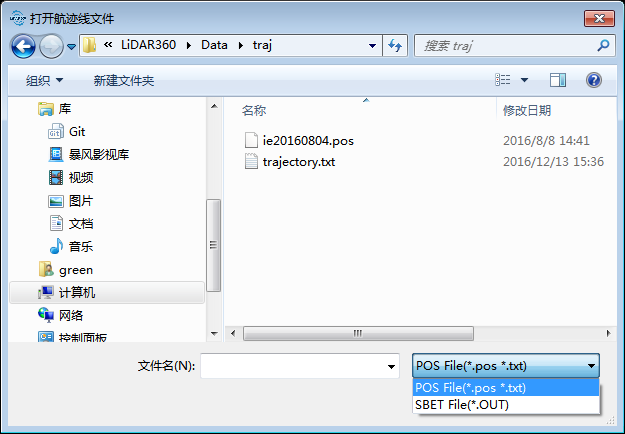
航迹线文件支持两种数据格式:POS(*.pos) 文本文件和SBET(*.out)二进制文件,弹出对话框并选择与点云匹配的航迹线文件,可选择一个或多个航迹线文件;
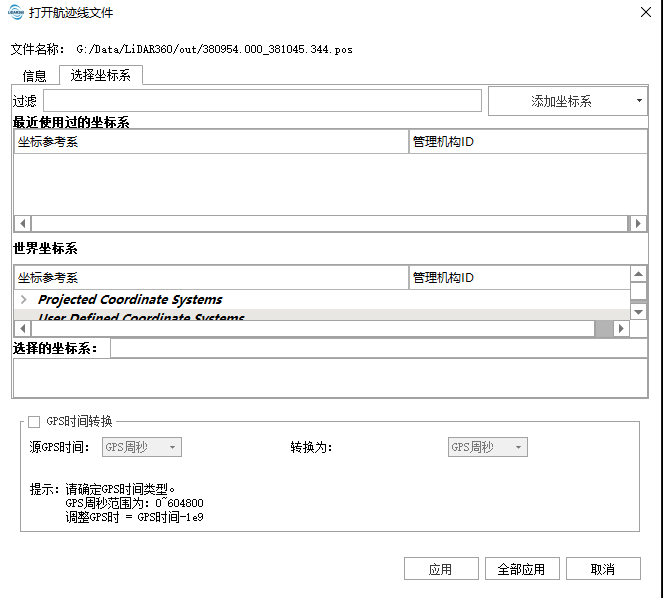
POS文件案例1:若POS文件中不包含GridX,GridY信息,则弹出界面如下图,匹配上相应的GPS时间、经度、纬度、高度、翻滚角(Roll)、俯仰角(Pitch)、偏航角(Heading)列。
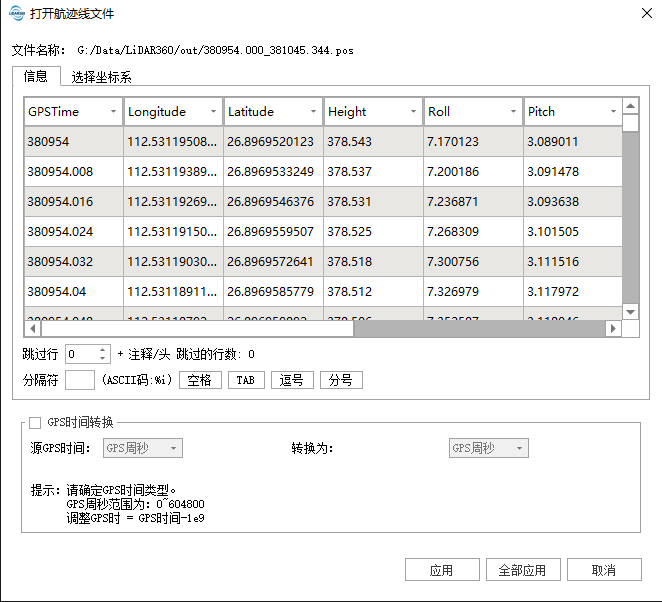
需在选择坐标系界面中选择相应的坐标系,如下图所示。
POS文件案例2:若POS文件中包含GridX,GridY信息,则弹出界面如下图,匹配上相应的GPS时间、经度、纬度、高度、翻滚角(Roll)、俯仰角(Pitch)、偏航角(Heading),GridX,GridY列。
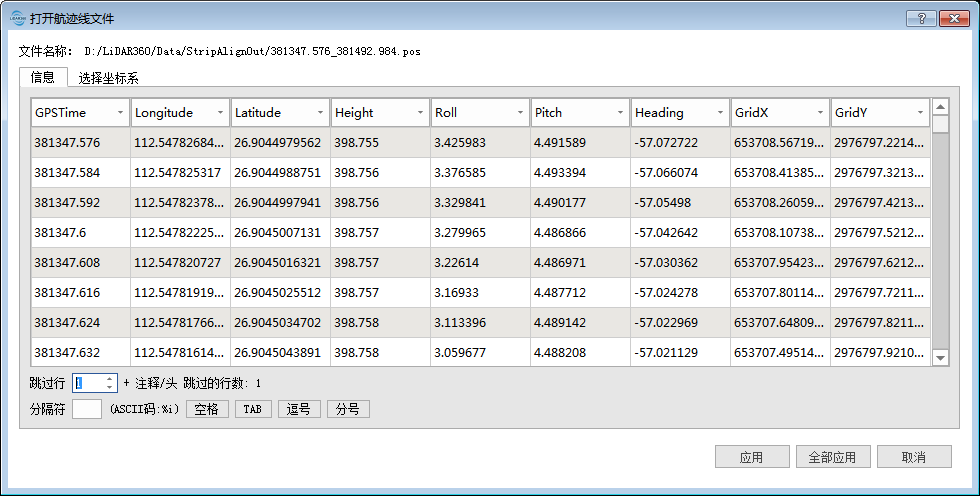
若GridX和GridY信息不正确,则可以如案例1所示选择正确的坐标系。
对于案例1和案例2,若点击“应用”只针对当前的航迹线文件的读取格式,点击后,会继续弹出界面对后续的航迹线文件进行相应的参数设置。若点击“全部应用”,当前参数匹配设置会应用于全部的航迹线文件。
添加的航迹线信息显示在航迹线列表窗口。
(可选)点击航迹线列表窗口中的
 设置工作区。
设置工作区。
 航迹线点选:点击该按钮,然后在场景中点击航迹线上某点,该点对应的信息会展示出来,如下图所示。
航迹线点选:点击该按钮,然后在场景中点击航迹线上某点,该点对应的信息会展示出来,如下图所示。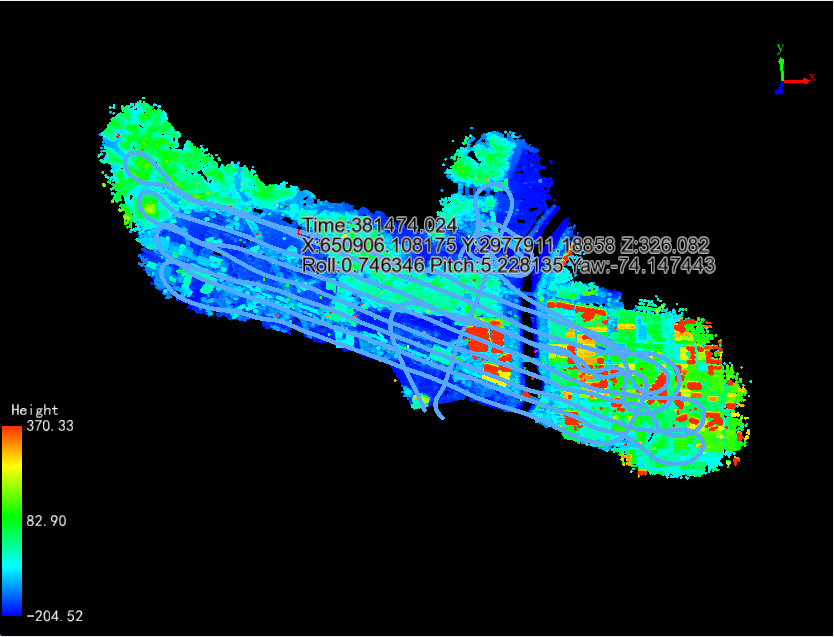
航段选择
4.1 多边形法进行航段选择
- 选中
 画多边形按钮。
画多边形按钮。 - 在场景中围绕感兴趣区域点击鼠标选取多个点,绘制多边形。
- 点击
 多边形选择按钮,将多边形区域内的航迹段选择出来。
多边形选择按钮,将多边形区域内的航迹段选择出来。
4.2 画刷法进行航段选择
- 选中
 画刷选择按钮。
画刷选择按钮。 - 在航迹线上点击选取分段起始点。
- 沿航迹选取分段结束点,起始点与结束点之间的航迹段被选择出来。
4.3 航迹图法进行航段选择
- 点击
 按航迹图选择按钮,用户界面底部将弹出航迹图,如下图所示。
按航迹图选择按钮,用户界面底部将弹出航迹图,如下图所示。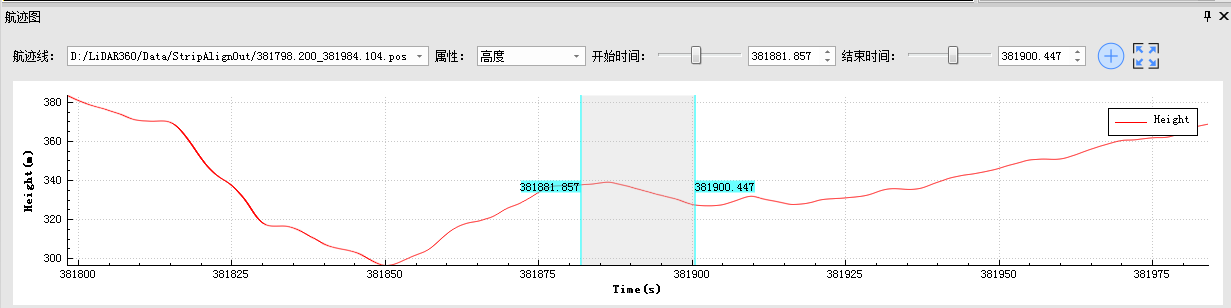
- (可选)在航迹线选择下拉框中选择航迹线,航迹图中显示出该航迹线以及该航迹线已被选择的航段信息。
- (可选)选择航迹线的显示属性,可选择按高度显示、按质量因子显示、按Roll角显示、按Pitch角显示、按Heading角显示和按速度显示。
- 拖动开始时间的滚动条选择航迹线段的起始时刻。
- 拖动结束时间的滚动条选择航迹线段的结束时刻。
- 点击
 按钮,起始时间与结束时间之间的航迹段被选择出来。
按钮,起始时间与结束时间之间的航迹段被选择出来。 - (可选)更改航迹图显示范围。在航迹图上使用鼠标滚轮上下滑动可放大缩小航迹图显示范围,点击
 按钮可还原默认显示。
按钮可还原默认显示。
选择的航段信息会添加到航迹线列表窗口。
- 选中
 航迹线分割:点击该按钮,依照选择的航段进行航迹线的分割,分割后自动移除原始航迹线,将分割后的子段航迹线加载到软件。分割会形成新的各分割段航迹线文件存于工作区内。
航迹线分割:点击该按钮,依照选择的航段进行航迹线的分割,分割后自动移除原始航迹线,将分割后的子段航迹线加载到软件。分割会形成新的各分割段航迹线文件存于工作区内。 根据航迹线裁切点云
根据航迹线裁切点云6.1 点击该按钮,弹出界面如下
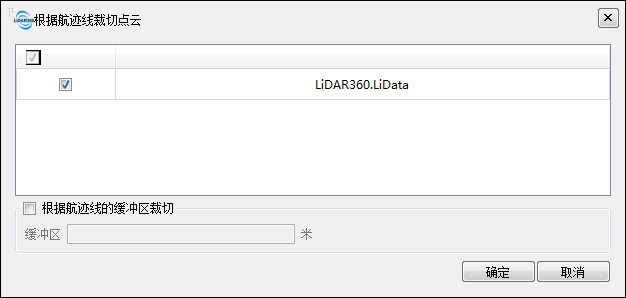
选择要裁切的点云数据,如果勾选“根据航迹线的缓冲区裁切”,则以航迹线为中心线,根据缓冲区设定的距离向两边进行裁切。
6.2 点击确定按钮,LiDAR360显示进度条,将点云按各航带进行裁切,裁切后得到的点云数据将默认存放在设置的工作区中。点云数据的名称与对应的POS文件名称相同。裁切结束后,弹出提示界面,是否将裁切的点云加载进来,点击“是”按钮,可以看到裁切形成的点云加载进软件并显示在三维场景中。
 点云与航迹线匹配:安置前,需要先将点云数据与航线进行匹配,隐藏或移除裁切前原始点云数据,点击该功能按钮,点云数据和相对应的航迹线将会在窗口中以相同的颜色显示,如下图所示。
点云与航迹线匹配:安置前,需要先将点云数据与航线进行匹配,隐藏或移除裁切前原始点云数据,点击该功能按钮,点云数据和相对应的航迹线将会在窗口中以相同的颜色显示,如下图所示。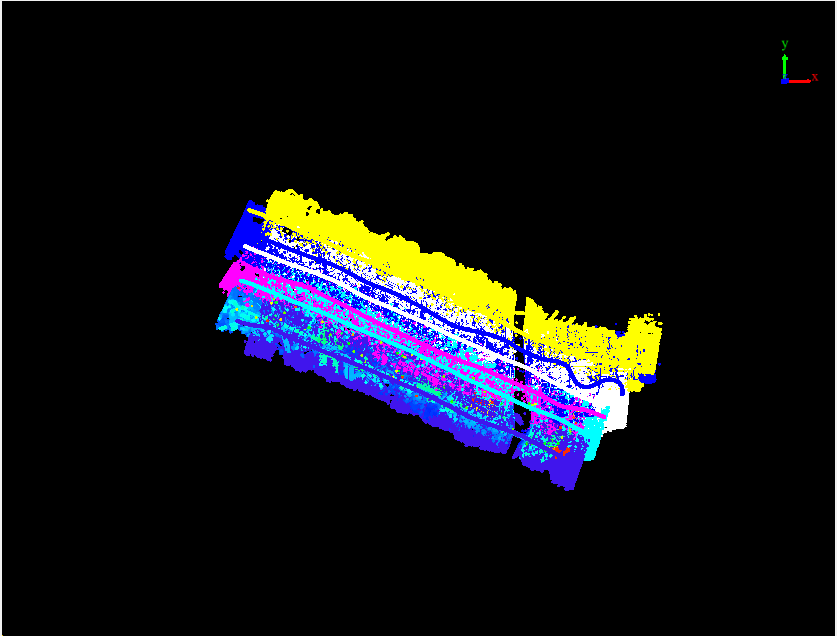
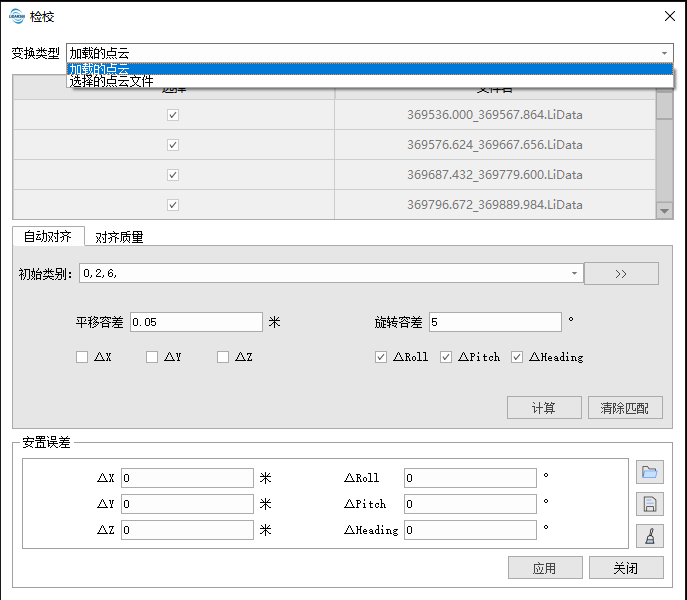
 检校:点击该按钮,弹出检校界面,如下所示。
检校:点击该按钮,弹出检校界面,如下所示。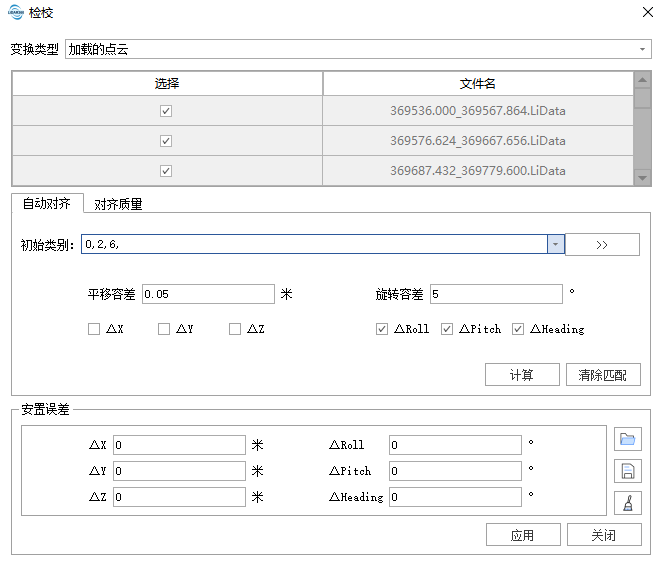
8.1检校主要是设置安置误差修正值,点云数据根据该修正值进行相应的变换操作,以实现最终基于航带的安置误差修正。要获取高质量的修正结果,安置误差修正值的选取尤为重要,LiDAR360提供了自动检校(自动对齐方式获取安置误差修正值)和人工检校(手动输入安置误差修正值)两种方式。
自动检校:在自动对齐窗口勾选最终需要计算的安置误差,输入平移容差和旋转容差后,点击计算,LiDAR360会自动计算安置误差,并将结果显示在安置误差修正参数框内,点击“清除匹配”,可删除拼接信息,在更改相关参数后,再次计算。 自动对齐模式下计算获得安置误差后,LiDAR360会统计对齐质量,点击“对齐质量”标签页可查看该统计信息,点击“导出”按钮可保存对齐质量信息,点击“生成报告”可以生成自动配准质量报告。自动安置相关原理请查看安置误差自动计算。
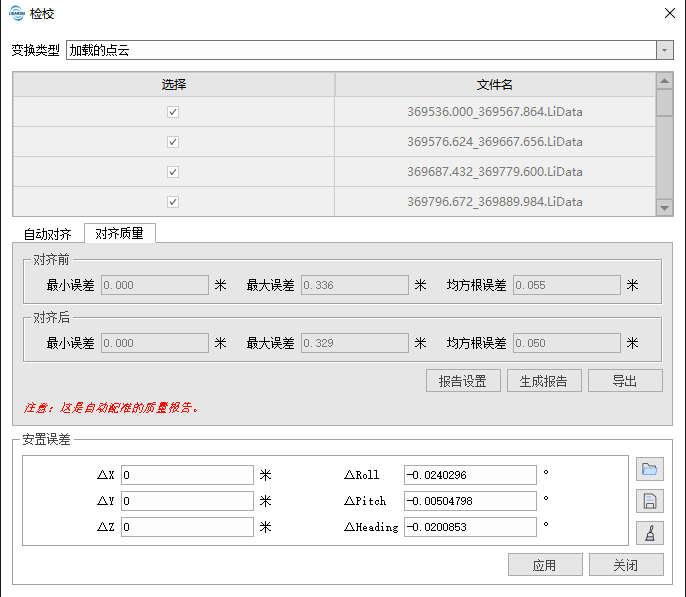 对齐质量展示界面人工安置:用户也可以自己输入安置误差修正参数,人工计算安置误差请参考人工测量检校。
对齐质量展示界面人工安置:用户也可以自己输入安置误差修正参数,人工计算安置误差请参考人工测量检校。点击“应用”按钮,误差修正变换作用在选择的变换类型上。
8.2 无论是自动方式还是人工方式,在变换过程中,可以使用剖面查看工具查看修正结果,如图所示。
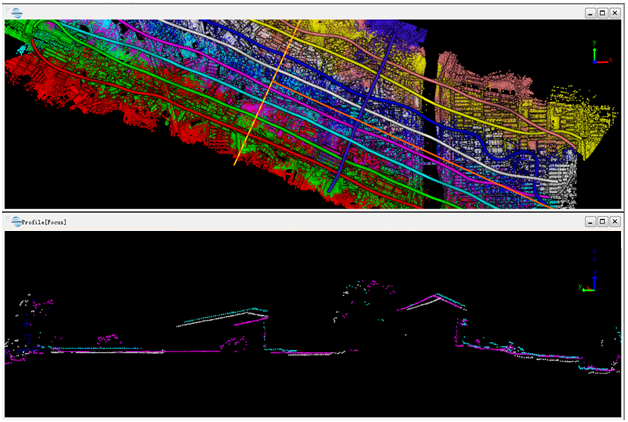 修正前
修正前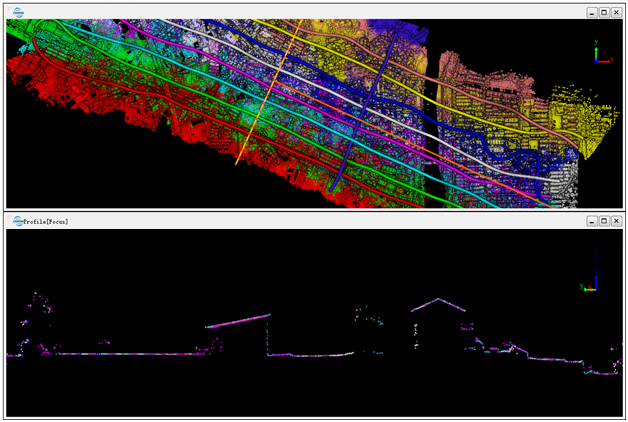 修正后
修正后8.3 可以通过右侧三个按钮依次加载误差修正文件,将当前参数保存成误差修正文件,或者清除当前设置的修正。
8.4 若匹配效果较好,则可将变换类型从“加载的点云”更改为“选择的点云文件”,然后点击“应用”,完成数据的安置。
 去冗余:点击按钮,弹出界面如下,设置去冗余相关参数,点击“确认”按钮,对重叠航线之间的冗余点进行分类/删除。
去冗余:点击按钮,弹出界面如下,设置去冗余相关参数,点击“确认”按钮,对重叠航线之间的冗余点进行分类/删除。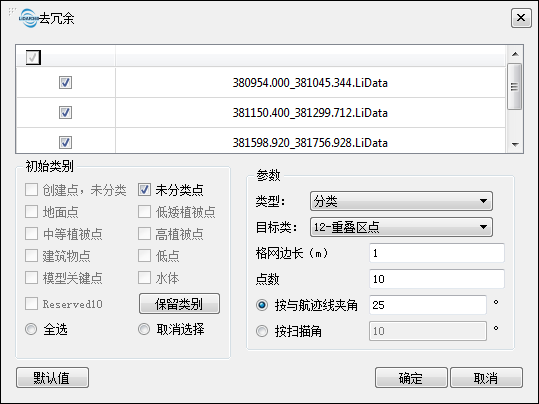
显示航迹线。
在航迹信息窗口选中要显示的航迹线,右键弹出子菜单,选择显示航迹线,被选中的航迹线颜色会发生渐变,并进行闪烁几次,以提示用户该条航迹线是被选中的航迹线。
航迹线或选择段删除操作
在航迹信息窗口中选中要删除的航迹线或选择段,右键弹出子菜单,点击删除按钮,删除选中的航线或选择段。
航迹线或选择段显隐操作
在航迹信息窗口中,航迹线或选择段行对应的勾选框可控制对应航线或选段的显隐。
航迹显示颜色方案
软件支持多种航迹显示方式,详情如下。
13.1 按时间显示(默认)
- 点击
 按钮,航迹按照采集时间选择,可在弹出的窗口选择颜色条。
按钮,航迹按照采集时间选择,可在弹出的窗口选择颜色条。
13.2 按高程显示
- 点击
 按钮,航迹按照高程显示,可在弹出的窗口选择颜色条。
按钮,航迹按照高程显示,可在弹出的窗口选择颜色条。
13.3 按质量显示
- 点击
 按钮,航迹按照质量显示,可在弹出的窗口上选择不同质量等级对应的颜色。
按钮,航迹按照质量显示,可在弹出的窗口上选择不同质量等级对应的颜色。
13.4 选择特定颜色显示
- 点击
 按钮,航迹按照指定的颜色显示,可在弹出的窗口中选择需要显示的颜色。
按钮,航迹按照指定的颜色显示,可在弹出的窗口中选择需要显示的颜色。
13.5 只显示选择段
- 选中
 按钮。仅被选择了的航线段显示出来,其他航线区域被隐藏。
按钮。仅被选择了的航线段显示出来,其他航线区域被隐藏。
- 点击
参数设置
- 根据航迹线裁切点云界面参数
- 缓冲区: 用来设置航迹线两边裁切保留的距离。
变换界面参数
- 安置误差修正
- ΔX/ΔY/ΔZ: 安置偏移量误差修正参数。
- ΔRoll/ΔPitch/ΔHeading: 安置姿态误差修正参数(横滚、俯仰、偏航)。
- 自动对齐:程序自动匹配航带间的相关点,并通过平差计算最优的安置误差修正值。
- 平移容差:最大平移量调整范围,对应ΔX、ΔY、ΔZ,程序默认设置为0.05米。
- 旋转容差:最大旋转量调整范围,对应ΔRoll、ΔPitch、ΔHeading,程序默认设置为5°。
- 可选项:用户可自由选择3个平移量和3个旋转量是否参与平差并计算修正值。在处理航空下视数据时不推荐修正ΔZ。默认勾选所有旋转量,而所有平移量不勾选。采用默认值即可获得较好的效果。
- 对齐质量:如采用自动对齐,则会计算对齐前后的误差值,进行质量评估,并将结果展示在对齐质量展示界面。
- 最小误差:成功匹配的相关点的最小误差。
- 最大误差:成功匹配的相关点的最大误差。
- 均方根误差:成功匹配的相关点的均方根误差。
- 变换类型:
- 加载的点云:对应LiDAR360平台加载进来和航迹线匹配上的点云,应用变换时,变换作用修改点云对应的内存数据,可在界面实时显示变换效果,退出安置模块时,相应的变换被清除,没有保存下来。
- 选择的点云文件:对应界面上勾选的点云文件,将对选取的点云文件进行变换操作,变换结果存储到硬盘上对应的文件。退出安置模块时,相应的变换已保存到点云文件,不会被清除。
- 去冗余界面参数:
- 类型:
- 分类:将点分成目标类别,并保留在原始点云中;
- 删除:将点分成目标类别,然后将它们从点云数据中移除(注意:如果输入点云中已有目标类别点,也会被删除)。
- 目标类:点云目标类别。
- 格网边长:重叠区域的栅格单元尺寸(长度),用户设置该参数用于将重叠区域的点云数据进行格网化。
- 密度:栅格单元的最小点密度。如果给定格网边长范围内的点数小于设定的点数阈值,则这些点不会被分为冗余点。
- 按与航迹线夹角:点云和航迹线之间的夹角,如果这个角大于设置值,那么点云将会被分为冗余点。
- 按扫描角:如果扫描角大于设置值,那么点云将会被分为冗余点。注意:该功能只能在点云数据能够记录扫描角信息的情况下使用。
注意:1.点云与航迹线匹配时,点云中所有点云的GPS时间大于等于某航迹线初始时间且小于等于该航迹线结束时间时,点云被视为与该航迹线匹配,否则视为不匹配。2.因为在大部分数据上,X、Y、Z对数据的影响较小,并且Z方向坐标需要地面控制点才能得到更高的精度,因此程序中默认调整Roll、Pitch和Heading三个参数。3.若数据POS精度不够,自动拼接之后可能仍存在一定偏移,用户可基于自动产生的结果再进行手动调整。4.去冗余功能需要至少两对匹配好的点云和航迹线。