泊松建模
功能概述
利用点云进行泊松建模,并生成.obj格式的三维模型文件。运行此功能前必须先对点云进行法向计算。
用法
点击 矿山 >巷道 > 泊松建模。
参数设置
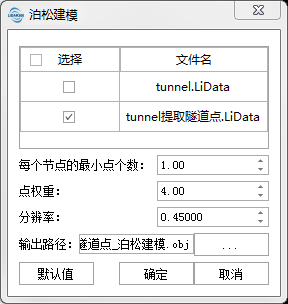
- 输入点云数据:输入一个或多个点云数据文件。文件格式:*.LiData。
- 每个节点的最小点个数(默认为“1.5”): 八叉树重建后保留在每个节点中的最小点个数,主要用于削弱噪点对重建结果的影响,此值越大,抗噪能力越强,但更多细节将被忽略。对于少量噪声的点云可以设置为1.0~5.0之间;对于含有大量噪声的点云可以设置为15~20之间。
- 点权重(默认为“2.0”): 所插值的点在泊松隐式方程中的权重。该权重值越大,所重建出的隐式三角网曲面就越接近原始点云。
- 分辨率(默认为“0.4”): 所重建出的隐式三角网曲面的分辨率。分辨率越高,所重建出的三角网越密,更多细节将予以保留;反之三角网越稀疏。