去噪
功能概述
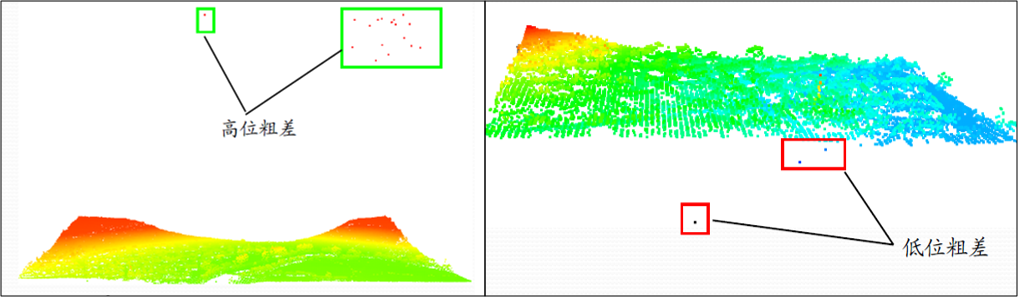
常见的噪声包括高位粗差和低位粗差,高位粗差通常是因为机载LiDAR系统在采集数据的过程中受到低飞的飞行物(比如鸟类或者飞机)的影响,误将这些物体反射回来的信号当作被测目标的反射信号记录下来。低位粗差则是由于测量过程中的多路径误差或者激光测距仪的误差导致产生的极低点。通过选择合适的参数,可以移除噪点,提高数据质量。该功能支持并行与内存资源控制设置。
假设标准差倍数为meanK,算法将对每一个点搜索指定邻域点个数的相邻点,计算点到相邻点的距离平均值D,计算这些平均值距离的中值meanD和标准差S,如果D大于最大距离MaxD(MaxD = meanD + meanK * S),则认为是噪点,将被去掉。如下图所示。
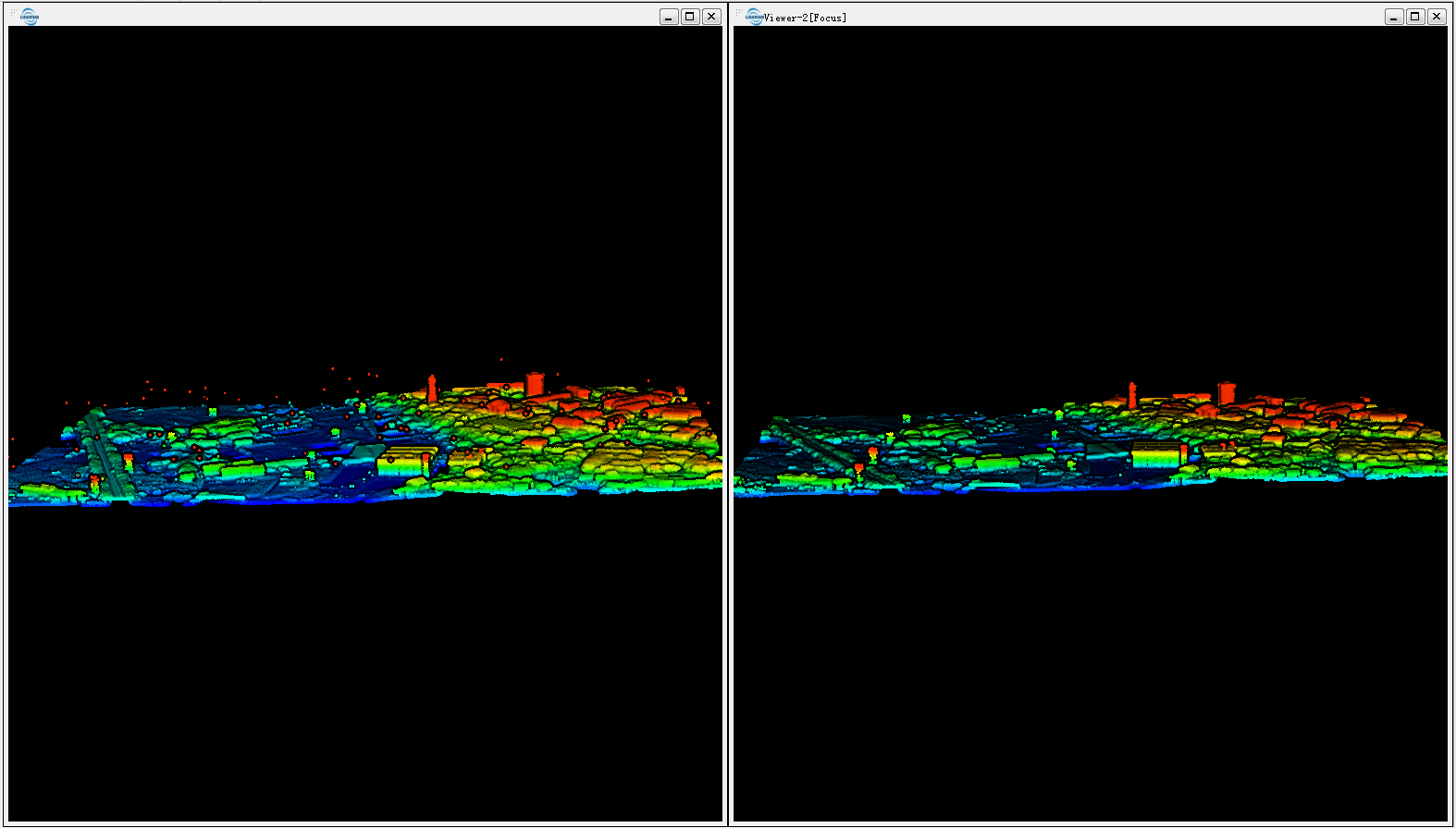
效果图如下:
用法
点击数据管理 > 点云工具 > 去噪
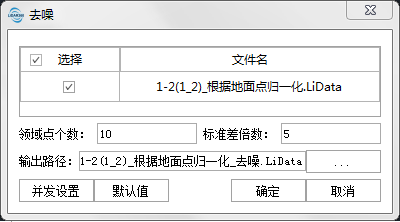
参数设置
- 输入数据:输入文件可以是单个点云数据文件,也可以是多数据文件。文件格式:*.LiData。
- 邻域点个数(默认为“10”):邻域内所需的点个数,用于计算邻域内每个点到该点的距离平均值D以及所有点的D的平均值meanD。若没有找到足够多的点,该点将不参与计算。
- 标准差倍数(默认为“5”):与平均距离meanD的标准偏差相乘的因子meanK。平均距离D大于meanD * meanK的点被认为是噪点。此值越小,将有更多的点被分为噪点。
- 输出路径:输出文件路径,功能执行后生成去除噪点后的新文件。输入多个文件时,该路径设置为文件夹。
- 并行设置:是否使用多核CPU并行计算机制进行去噪处理。
注意:由于该功能的算法原理,为了更好的去除噪点,可以反复运行该算法。但对于密集的噪点效果不好。